

Figure 1.
Figure 2.
Figure 3.
Figure 4.
Figure 5.
Figure 6.
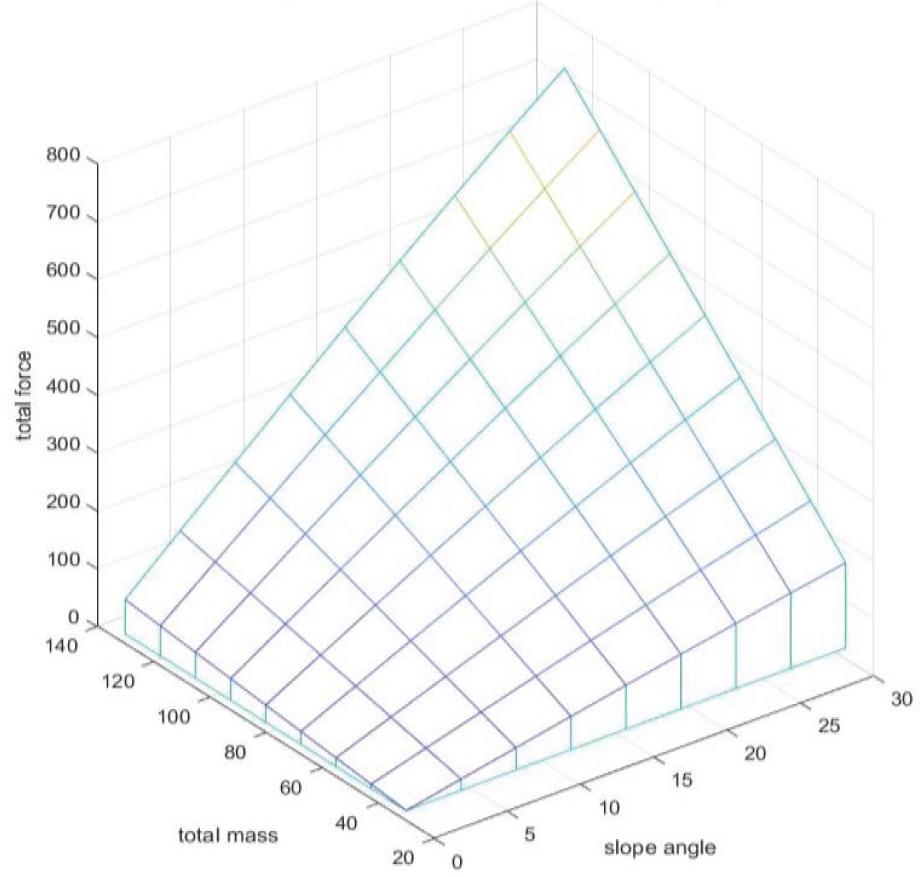
Figure 7.
Figure 8.
Results of analytical calculations for each wheel of the mobile transportation robot
| Parameter | Mean | Std. Dev. | Min. | Max. | Range |
|---|---|---|---|---|---|
| Tractional Force (N) | 311.993 | 6.845 | 299.6 | 318.83 | 19.23 |
| Total Driving Force (N) | 74.388 | 37.38 | 19.38 | 128.42 | 109.04 |
| Tractional Torque (Nm) | 15.007 | 0.329 | 14.41 | 15.34 | 0.93 |
Comparison of AMRs and AGVs
| Feature | AMRs | AGVs |
|---|---|---|
| Navigation Technology | AI-driven sensor-based navigation (LiDAR, cameras, millimeter-wave sensing) [17] | Follow fixed paths using magnetic strips, beacons, or QR codes [18] |
| Path Dependency | No predefined paths; dynamically plans routes in real-time [17] | Fixed paths with minimal deviation from predefined routes [18] |
| Environmental Adaptability | Highly adaptable to unstructured and dynamic environments [17,19] | Limited to structured environments with predefined routes [18] |
| Obstacle Detection | Advanced AI-based obstacle detection with real-time path adjustments [20] | Basic obstacle detection; usually stops when encountering obstacles [18] |
| Operational Flexibility | High flexibility; can navigate new environments without pre-set guides [21] | Low flexibility; requires infrastructure modification for route changes [21] |
| Implementation Cost | Higher initial investment due to advanced sensing and AI [22] | Lower initial investment but higher cost for infrastructure setup [22] |
| Application Suitability | Smart factories, adaptive logistics, and warehouses [17,18] | Manufacturing lines, repetitive logistics, and controlled environments [17] |
| Path-Planning Algorithms | Hybrid A*, RRT, D*, and reinforcement learning-based methods [23] | Mostly rule-based or fixed path-following algorithms [23] |
Comparison of implemented path planning algorithms
| Hybrid A* Algorithm | Move Base (A* Algorithm) |
|---|---|
| Shows strong performance in real-time path adjustments and obstacle avoidance.
|
Results of analytical calculations for each wheel of mobile transportation robot
| Slope Angle | Payload and System Mass (kg) | Tractional Force (Ftr) (N) | Total Driving (Fdrv) (N) | Tractional Torque (Tr) (Nm) |
|---|---|---|---|---|
| 0.0° | 130 | 318.83 | 19.38 | 15.34 |
| 2.5° | 130 | 318.52 | 33.28 | 15.32 |
| 5.0° | 130 | 317.61 | 47.16 | 15.28 |
| 7.5° | 130 | 316.10 | 60.99 | 15.20 |
| 10.0° | 130 | 313.98 | 74.74 | 15.10 |
| 12.5° | 130 | 311.27 | 88.38 | 14.97 |
| 15.0° | 130 | 307.96 | 101.89 | 14.81 |
| 17.5° | 130 | 304.07 | 115.25 | 14.63 |
| 20.0° | 130 | 299.60 | 128.42 | 14.41 |
DC motor general specifications
| General Specifications | |
|---|---|
| Rated voltage | 12 V |
| Size | 37D × 70L mm |
| Shaft diameter | 6 mm |
| Gear ratio | 70:1 |
| Speed without load | 150 rpm |
| Speed at max. efficiency | 130 |
| Current without load | 0.2 A |
| Current at max. efficiency | 0.68 A |
| Stall torque | 27 kg/cm |
| Torque at max. efficiency | 32 kg/cm |
| Encoder resolution | 64 CPR |