

Industry 4.0 is an era characterized by transformative evolution in the field of manufacturing, facilitated by the high speed at which digitalization, automation, and the integration of advanced technologies are evolving. It is characterized by the combination of robots, the Internet of Things (IoT), and big data analytics, bringing these technologies together in an integrated whole [1]. The industrial revolution has introduced the idea of Logistics 4.0, which favors internal logistics through automation and data-oriented strategies that consequently reduce the demand for human labor in material handling. Autonomous Mobile Robots (AMRs) have become a central technology within this revolution, providing the flexibility and versatility required for intricate and dynamic manufacturing setups [2]. In contrast to Automated Guided Vehicles (AGVs), which run along pre-programmed routes, AMRs utilize sensors, complex systems, and algorithms for autonomous navigation, which enable them to respond dynamically to changes in their environment [3].
AMRs and AGVs are both extensively utilized for intralogistics tasks, but they greatly differ in navigation methods and functionality.
AGVs require physical infrastructure such as magnetic strips, wires, or markers on the floor to lead them on set paths. This setup facilitates reliability and precision in facilities where repetitive, organized processes are the norm. However, AGVs lack the flexibility required to navigate unstructured settings where paths undergo frequent change. Hence, they are less suitable for environments that call for flexibility and adaptability to new layouts, e.g., modern manufacturing plants [4, 5].
AMRs transform intralogistics. Unlike conventional solutions, they don’t need pre-defined routes; rather, they utilize advanced sensors like LiDAR, cameras, and inertial measurement units (IMUs) to dynamically and intelligently map and navigate their surroundings. AMRs use methods like simultaneous localization and mapping (SLAM) in conjunction with path-planning algorithms to build their own map of the route, regardless of any alteration in the environment in real-time. Such mobility allows AMRs to move over and around obstacles efficiently, re-route themselves automatically, and adapt to new conditions, making them particularly suitable for complex manufacturing environments where operational responsiveness and efficiency are of the essence [6, 7]. In addition, AMRs are engineered with safety features that allow them to operate in partnership with human workers, allowing them to move around working environments together without causing any harm. This is a feature that AGVs cannot offer to the same degree, since they move along predefined paths [8].
AMRs are highly valuable in factories, where they optimize productivity, conserve labor, and minimize downtime. By carrying out repetitive and manual transport tasks on their own, AMRs enable human labor to focus on more advanced tasks and thus boost its productivity. Such internal logistics automation aligns with the principles of Logistics 4.0, which promote speed, accuracy, and data integration in material handling [2, 9]. In contrast to traditional automation, which typically requires large infrastructures and fixed pathways, AMRs allow for more flexibility and scalability in a more adaptive solution that addresses evolving production demand and workflow configurations without requiring significant alterations to factory layouts [10].
In terms of state-of-the-art robotics, AMRs are at the intersection of robotics, artificial intelligence, and Internet of Things (IoT) technology. This intersection makes it possible for AMRs to gather, process, and respond to vast volumes of information in real time, thereby facilitating their easy operation in sophisticated environments. The Robot Operating System (ROS) platform has been key to advancing the evolution of AMRs through the facilitation of a modular, open-source structure for integrating multiple sensors, software algorithms, and control systems. ROS enables real-time control, communication, and sensor fusion, and is hence an ideal framework for AMRs in dynamic manufacturing systems [11, 12].
Evidence collected through research carried out in [12] and [13] demonstrates the efficacy of ROSbased AMRs (including software such as Gazebo and MoveIt) in the simulation, development, and optimization phases of robotic systems.
The design and advancement of Autonomous Mobile Robots, also referred to as AMRs, requires cross-disciplinary collaboration between mechanical design, electronics, and software systems integration. On the mechanical front, it is necessary that AMRs be made highly reliable, stable, and versatile regarding the variety of payloads they can accommodate and the evolving physical requirements of factory floors. A 2014 study [15] emphasizes the need for developing cooperative mobile robots with lifting devices, thereby increasing the robots' load-carrying ability. This is a feature vital to material handling tasks in production environments [14]. Efficient mechanical design often employs lightweight materials and modular components to support efficiency and affordability without compromising on strong performance.
Within the domain of electronics, an autonomous mobile robot (AMR) employs a series of sensors to acquire the vital environmental information needed for movement, collision detection, and balancing. In general, AMRs have employed a series of LiDAR sensors, cameras, and an IMU to constantly monitor their surroundings and react to environmental changes. In particular, a sensory system employing LiDAR and stereo cameras and utilizing a Robot Operating System (ROS) has been presented in [7], highlighting the impact of large-scale sensor arrangements on enhancing robot navigation and collision avoidance capabilities. Additionally, [16] explores stabilization techniques using sensor fusion, highlighting the significance of integrated sensors in enhancing AMR performance against varying load conditions. These developments enable AMRs to operate autonomously while adjusting to environmental and operational variables.
The ROS framework has been instrumental in advancing AMR development by providing robust tools for software integration and real-time system communication. ROS’s open-source structure allows developers to implement advanced functionalities like SLAM, path planning, and obstacle detection, making it an ideal choice for AMRs that must operate in dynamic, unstructured environments.
Quigley et al. introduced ROS as a versatile framework that enables seamless communication between various sensors, actuators, and control algorithms, further enabling AMRs to handle complex navigation and decision-making processes [11].
The demand for AMRs worldwide has risen greatly. The market for industrial AMRs was valued at approximately $1.97 billion USD in 2021, and is anticipated to continue to grow as industries embrace more automation [10]. Major companies like Amazon have realized the potential of utilizing AMRs for large-scale use. One example is Amazon’s Proteus robot, which moves by itself around warehouse areas alongside human workers. Proteus demonstrates the ability of AMRs to seamlessly and safely integrate into collaborative workspaces, thereby illustrating their significance in large-scale logistics [10]. Beyond Amazon, firms like Mobile Industrial Robots (MiR), Boston Dynamics, and GeekPlus have led the development of AMR solutions in sectors like manufacturing, healthcare, and warehousing, illustrating the flexibility and broad applications of AMR technology [8, 9].
As the demand for Autonomous Mobile Robots, or AMRs, continues to experience a drastic upward trend, both research and commercial innovation are playing their respective roles in fueling the innovation rate of this rapidly-evolving industry. The present research project takes a cue from this established body of work by proposing an integrated and complete system based on the Robot Operating System, or ROS, specifically designed for AMRs. The proposed system entails the integration of modern mechanical design principles and sensor technology designed for enhanced performance, as well as the application of advanced navigation algorithms that are intelligent in nature. All these elements are particularly tailored to address and effectively solve the complex intralogistics problems that are commonly faced by modern manufacturing plants today.
Table 1 shows the comprehensive differences between AMRs and AGVs, with their respective navigation systems, flexibility levels, adaptability, and operational costs, supported by pertinent scholarly literature.
Comparison of AMRs and AGVs
| Feature | AMRs | AGVs |
|---|---|---|
| Navigation Technology | AI-driven sensor-based navigation (LiDAR, cameras, millimeter-wave sensing) [17] | Follow fixed paths using magnetic strips, beacons, or QR codes [18] |
| Path Dependency | No predefined paths; dynamically plans routes in real-time [17] | Fixed paths with minimal deviation from predefined routes [18] |
| Environmental Adaptability | Highly adaptable to unstructured and dynamic environments [17,19] | Limited to structured environments with predefined routes [18] |
| Obstacle Detection | Advanced AI-based obstacle detection with real-time path adjustments [20] | Basic obstacle detection; usually stops when encountering obstacles [18] |
| Operational Flexibility | High flexibility; can navigate new environments without pre-set guides [21] | Low flexibility; requires infrastructure modification for route changes [21] |
| Implementation Cost | Higher initial investment due to advanced sensing and AI [22] | Lower initial investment but higher cost for infrastructure setup [22] |
| Application Suitability | Smart factories, adaptive logistics, and warehouses [17,18] | Manufacturing lines, repetitive logistics, and controlled environments [17] |
| Path-Planning Algorithms | Hybrid A*, RRT, D*, and reinforcement learning-based methods [23] | Mostly rule-based or fixed path-following algorithms [23] |
The ROS-based autonomous mobile robot (AMR) used for intralogistics purposes in a manufacturing factory is an integrative system that comprises mechanical, electronic, and software system components. In this section, we elaborate on the considerations that guided the development of the ROS-based autonomous mobile robot (AMR), the development and testing processes, and measures that ensure its optimal performance.
The AMR’s mechanical design process placed a high priority on several key aspects — including durability, load capacity, and maneuverability — in order to address and fulfilling the diverse requirements of various manufacturing settings.
To achieve overall design strength and durability, a process known as finite element analysis (FEA) was thoroughly utilized as an essential and invaluable tool to analyze and examine the structural strength of the AMR. Tests included various operational loading conditions to which the robot would inevitably be subjected in its real-world applications and operations. Through the help of FEA, the chassis was designed to be strong enough to carry changing loads and be light in weight, using aluminum 5754-O sheet metal to achieve the optimal strength-to-weight ratio for the best performance and consequently maximum mobility and energy efficiency. Fig. 1 displays the chassis of the AMR, establishing the layout of load-carrying segments and motor bedding necessary for stable functionality.
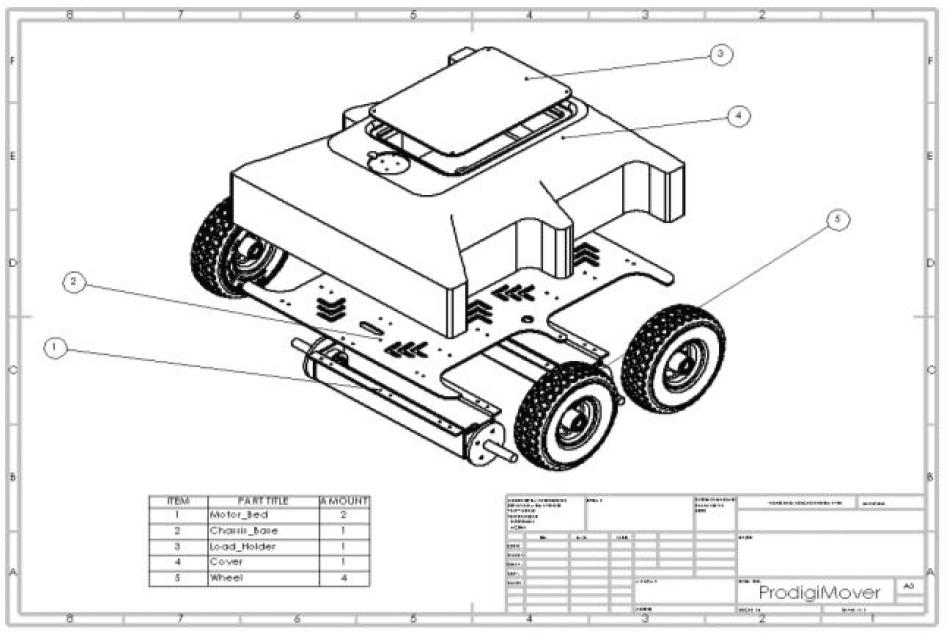
Exploded 3D model of mobile transportation robot
In order to improve its flexibility, the AMR has been designed with a modular structure that facilitates easy assembly, maintenance, and replacement of its modules.
Figure 2 shows the modular structure of the AMR system, designed as a 3D model with easily distinguishable parts that make it easy to customize the system for different operational requirements. In designing the AMR system, kinematic analysis has been used for the wheels and actuators of the system to enable the AMR system to pass through manufacturing environments with complex and narrow paths.
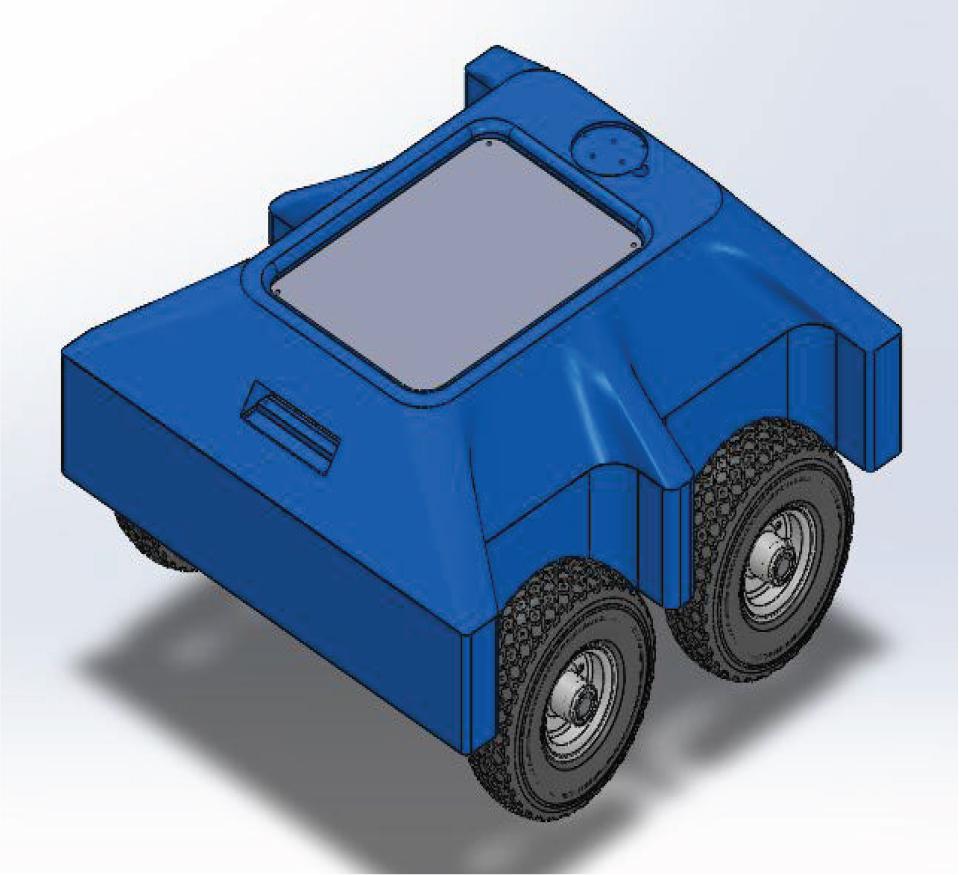
3D model view of mobile transportation robot
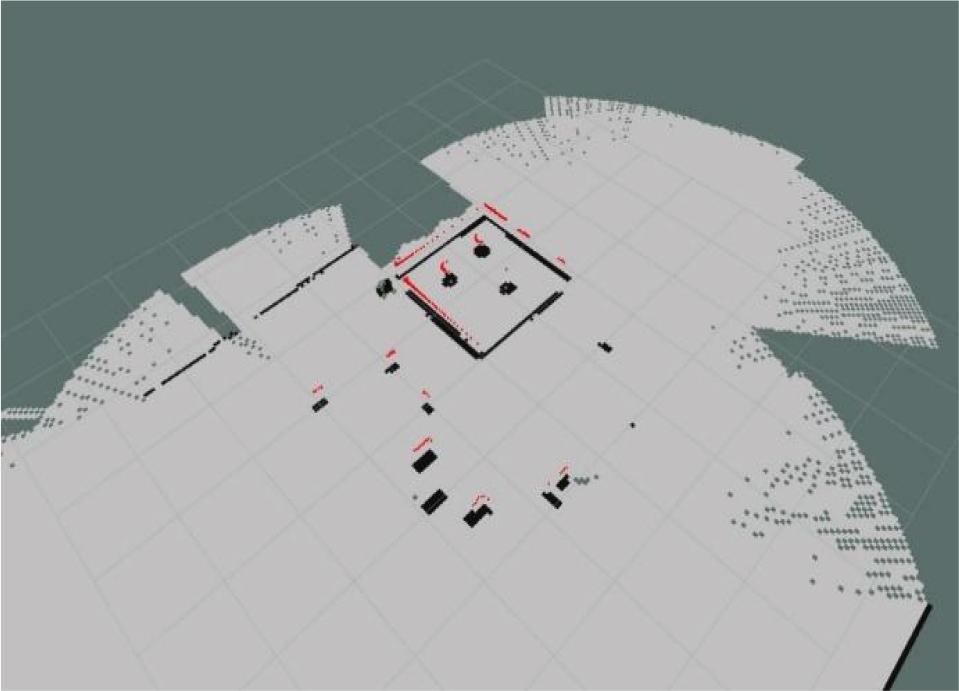
Creation of map by slam_gmapping node according to real-world environment
The AMR’s electronic architecture has been designed for accurate localization, data processing, and communication. A comprehensive set of sensors, comprising a LiDAR, a stereo camera, and an inertial measurement unit, are the core of the electronic architecture of the AMR. This set of sensors equips the AMR with the capability of simultaneous localization and mapping, as well as the ability to detect objects on the navigation route, thus enabling the AMR to create a map of the environment in real time.
In order to achieve accurate and stable data from the localization system, necessary for the safe navigation of the AMR, the data from the LiDAR, camera, and IMU are fused together using Kalman filter methods [16].
The main power source utilized by the Autonomous Mobile Robot (AMR) is a lithiumion battery pack. This is effectively utilized through a battery management system. The system ensures continuous monitoring of the power levels present in the batteries. Moreover, it optimizes the utilized power to attain the maximum levels of efficiency. The configuration ensures effective utilization of the batteries to cater to situations where higher levels of expenditure are required, like lifting heavier loads and moving over larger distances. For precise and efficient control of the movement of the AMR, DC motors have been chosen as the most efficient. For this purpose, control algorithms have been programmed to adjust the speed and direction of movement based on the changing conditions provided by the load. Table 2 presents a detailed analysis of the utilized motors, focusing particularly on the configuration that ensures efficient movement.
DC motor general specifications
| General Specifications | |
|---|---|
| Rated voltage | 12 V |
| Size | 37D × 70L mm |
| Shaft diameter | 6 mm |
| Gear ratio | 70:1 |
| Speed without load | 150 rpm |
| Speed at max. efficiency | 130 |
| Current without load | 0.2 A |
| Current at max. efficiency | 0.68 A |
| Stall torque | 27 kg/cm |
| Torque at max. efficiency | 32 kg/cm |
| Encoder resolution | 64 CPR |
ROS offers an underlying software infrastructure, supporting modularity, flexibility, and real-time processing of the data. ROS’s gmapping package was used to provide SLAM capability, which allowed the AMR to build and update its environmental map while navigating around the facility. This functionality is depicted as a Creation Map by slam_gmapping Node, which shows a sample map being built by the AMR while it navigates through various zones.
For path planning and obstacle avoidance, ROS’s move base package is used, which includes a Hybrid A* algorithm that aids in optimizing paths. This is beneficial for an AMR because obstacles can be avoided in real-time, thus facilitating safe movement around other equipment and people. Based on Figure 4, the Hybrid A* algorithm is beneficial for an AMR because it aids in efficient movement through complex and shared areas, thus emphasizing its flexibility for use in active manufacturing.
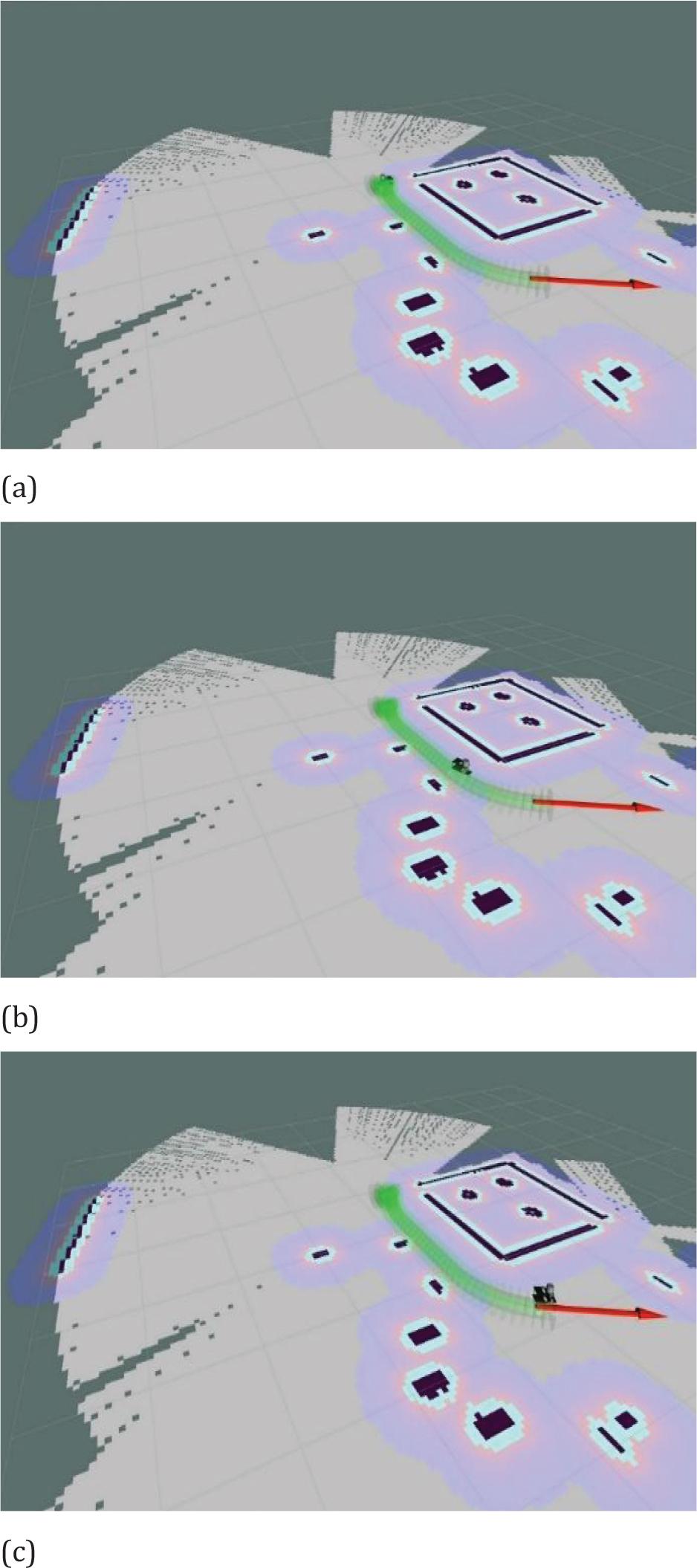
Path planning with Hybrid A* node
A multi-threaded ROS node configuration was employed to handle concurrent tasks, such as localization, sensor monitoring, and movement control. This structure allows the AMR to process real-time data and adapt continuously during operation, providing responsive and autonomous navigation. Fig. 5 illustrates the data exchange essential for smooth operation in dynamic manufacturing settings.
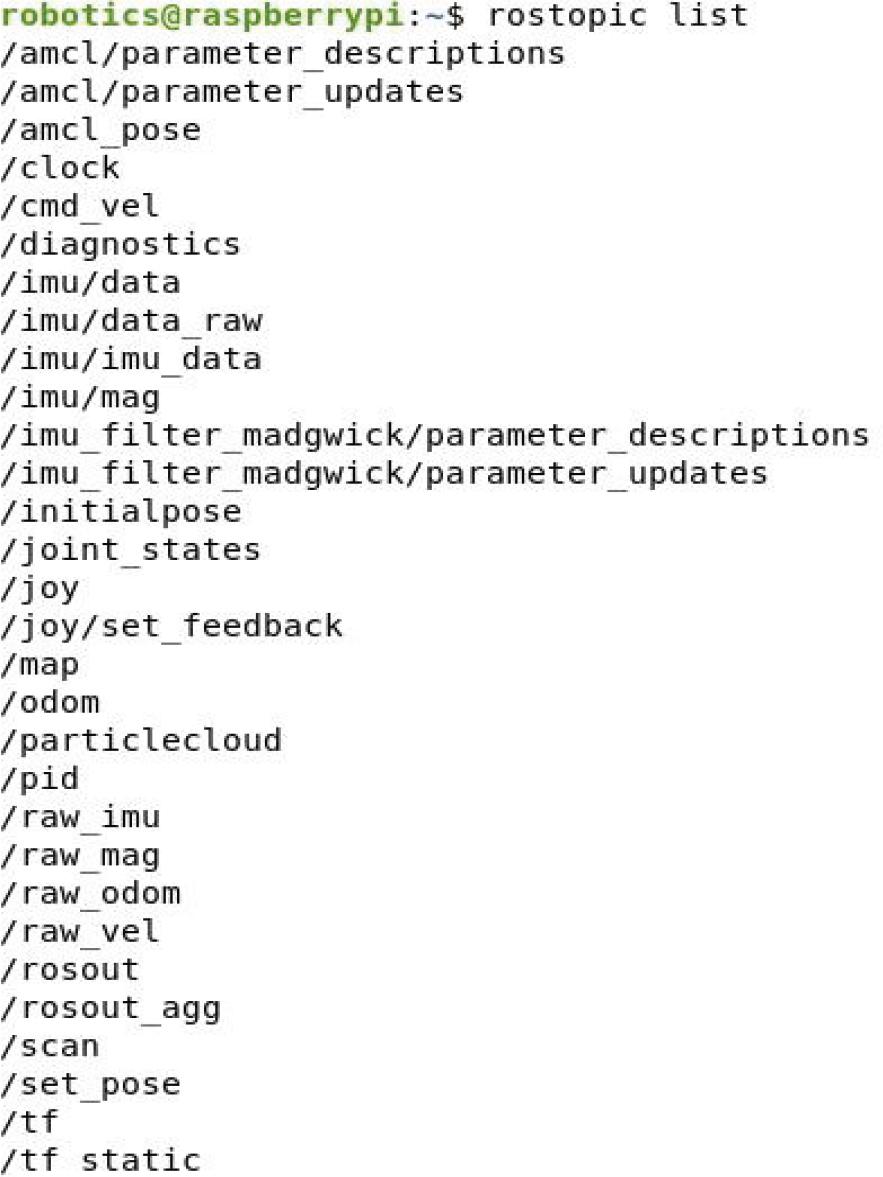
Published and subscribed topics during localization process
The AMR underwent rigorous testing in both simulated and real-world environments to validate its performance in navigation, load handling, obstacle avoidance, and energy efficiency. Simulation testing was first conducted in the Gazebo environment, which allowed for iterative adjustments and validation of SLAM and path-planning algorithms. This stage provided a controlled setting for optimizing the AMR’s navigation and obstacle-avoidance functions.
Following the success of this simulation, the AMR was deployed in a controlled section of a manufacturing facility to assess its performance in load handling and real-world navigation. In this phase, the AMR demonstrated its ability to autonomously traverse the facility and adjust to both static and dynamic obstacles, effectively handling various loads. Table 3 provides a clear explanation of the optimized force and torque configurations that play a fundamental role in guaranteeing stability and achieving energy efficiency in the process of load transport. The values provided in the table were calculated meticulously, taking into consideration a large number of slope angles in order to fully investigate the effects of these angles on the tractional force, total driving force, and tractional torque involved in the operation.
Results of analytical calculations for each wheel of mobile transportation robot
| Slope Angle | Payload and System Mass (kg) | Tractional Force (Ftr) (N) | Total Driving (Fdrv) (N) | Tractional Torque (Tr) (Nm) |
|---|---|---|---|---|
| 0.0° | 130 | 318.83 | 19.38 | 15.34 |
| 2.5° | 130 | 318.52 | 33.28 | 15.32 |
| 5.0° | 130 | 317.61 | 47.16 | 15.28 |
| 7.5° | 130 | 316.10 | 60.99 | 15.20 |
| 10.0° | 130 | 313.98 | 74.74 | 15.10 |
| 12.5° | 130 | 311.27 | 88.38 | 14.97 |
| 15.0° | 130 | 307.96 | 101.89 | 14.81 |
| 17.5° | 130 | 304.07 | 115.25 | 14.63 |
| 20.0° | 130 | 299.60 | 128.42 | 14.41 |
A detailed statistical analysis of the results can be obtained by referring to table 4, where it is possible to see the essential parameters: the mean, standard deviation, minimum, maximum, and range. This will become crucial for the interpretation of how both consistency and variation are represented in the results for force and torque in the various circumstances.
Results of analytical calculations for each wheel of the mobile transportation robot
| Parameter | Mean | Std. Dev. | Min. | Max. | Range |
|---|---|---|---|---|---|
| Tractional Force (N) | 311.993 | 6.845 | 299.6 | 318.83 | 19.23 |
| Total Driving Force (N) | 74.388 | 37.38 | 19.38 | 128.42 | 109.04 |
| Tractional Torque (Nm) | 15.007 | 0.329 | 14.41 | 15.34 | 0.93 |
To obtain a wider range of confirmatory results, the performance of AMR was also tested with various performance metrics, including navigation velocity, obstacle detection precision, load stability, and energy consumption. Table 5 shows that, when various path-planning algorithms were compared, Hybrid A* proved to be the most effective algorithm for a dynamic environment, while Move Base proved to be highly effective for environments with a more routine pattern. These results confirm that the proposed AMR is effective for use in an intralogistics role in a manufacturing environment.
Comparison of implemented path planning algorithms
| Hybrid A* Algorithm | Move Base (A* Algorithm) |
|---|---|
| Shows strong performance in real-time path adjustments and obstacle avoidance.
|
The ROS-based AMR intralogistics design significantly enhances production material handling. It combines robust mechanical design, advanced sensor fusion, and the Hybrid A* path-planning algorithm to provide more flexibility, precision, and safety than traditional AGVs. The paper presents novel developments in the design, navigation, and path-planning of AMRs for manufacturing intralogistics. Each contribution utilizes the latest and best techniques in the industry, and includes well-designed mechanisms to render the AMR efficient, flexible, and dependable in dynamic manufacturing settings.
The mechanical structure of the AMR is loadbearing, optimized through diligent FEA analysis of forces and torques for varied conditions. High-strength aluminum allows the chassis to endure heavy loads while remaining light in weight, which is necessary for maneuverability and operational efficiency. Fig. 6 is a graph of torque values against payload mass and slope angle, as well as the motor requirements under maximum load. This equilibrium ensures reliable material transport for the AMR across slopes with varying conditions within a factory to minimize the use of manual effort and increase efficiency. Analyzing structures led to the selection of accurate motors with specified torque performance for precise improvement of the robot’s load-handling capabilities.
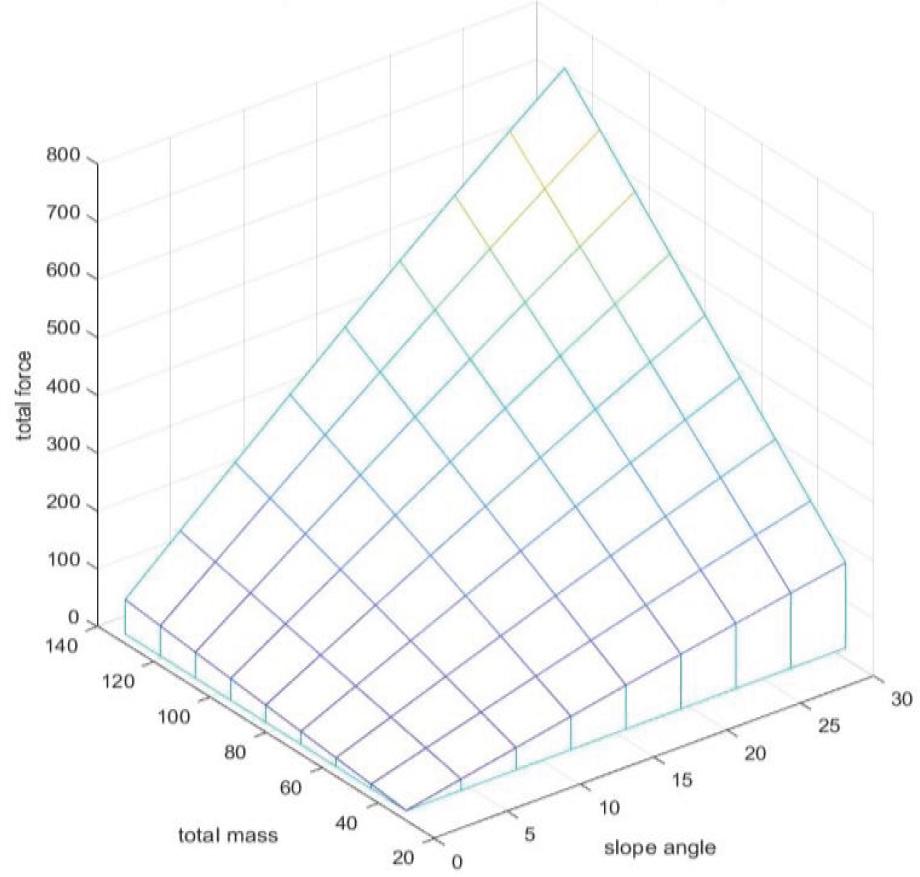
The torque is changing in terms of mass and slope angle
For precise and autonomous navigation, the AMR employs a SLAM system, implemented through the slam_gmapping ROS package. This system uses LiDAR and odometry data to generate real-time maps, allowing the robot to navigate dynamic layouts without human intervention. Fig. 7 illustrates the detailed maps created during Gazebo simulations, which enabled high-accuracy navigation across various environments. The SLAM process achieved localization accuracy within 2 cm during real-world testing, as highlighted by odometry data in Fig. 8. This precision is crucial for safe operations in manufacturing environments with constantly changing layouts and mobile obstacles like equipment and personnel.
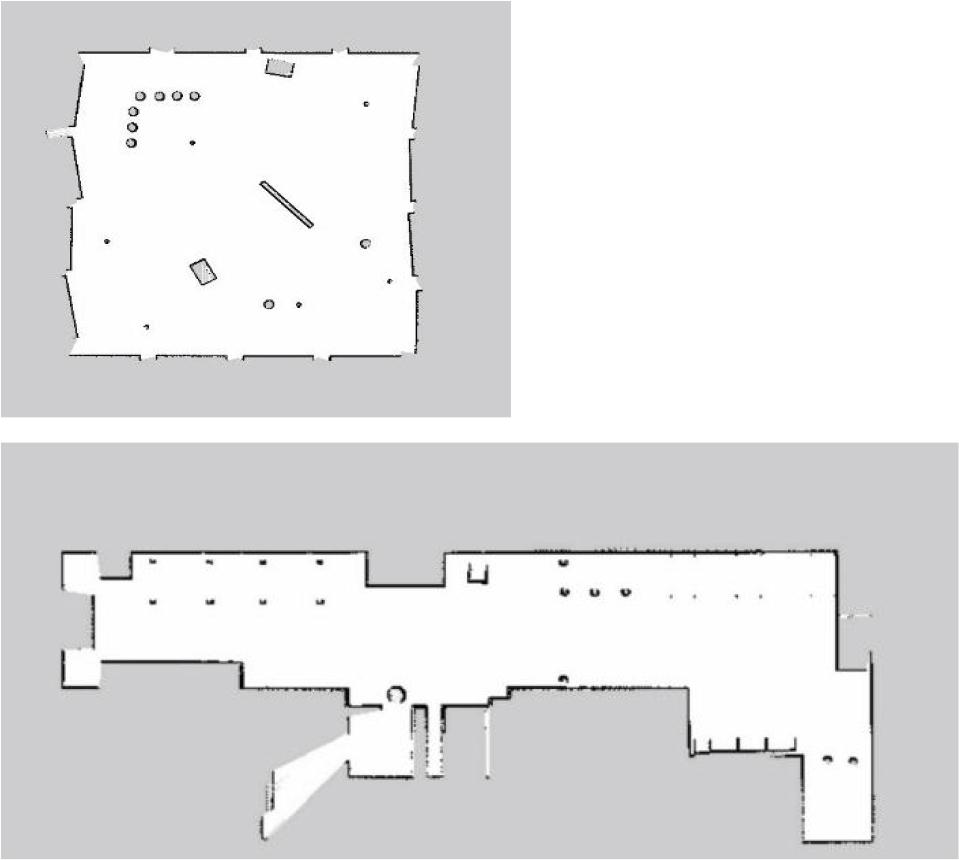
Created maps by slam_gmapping node according to gazebo worlds on ROS
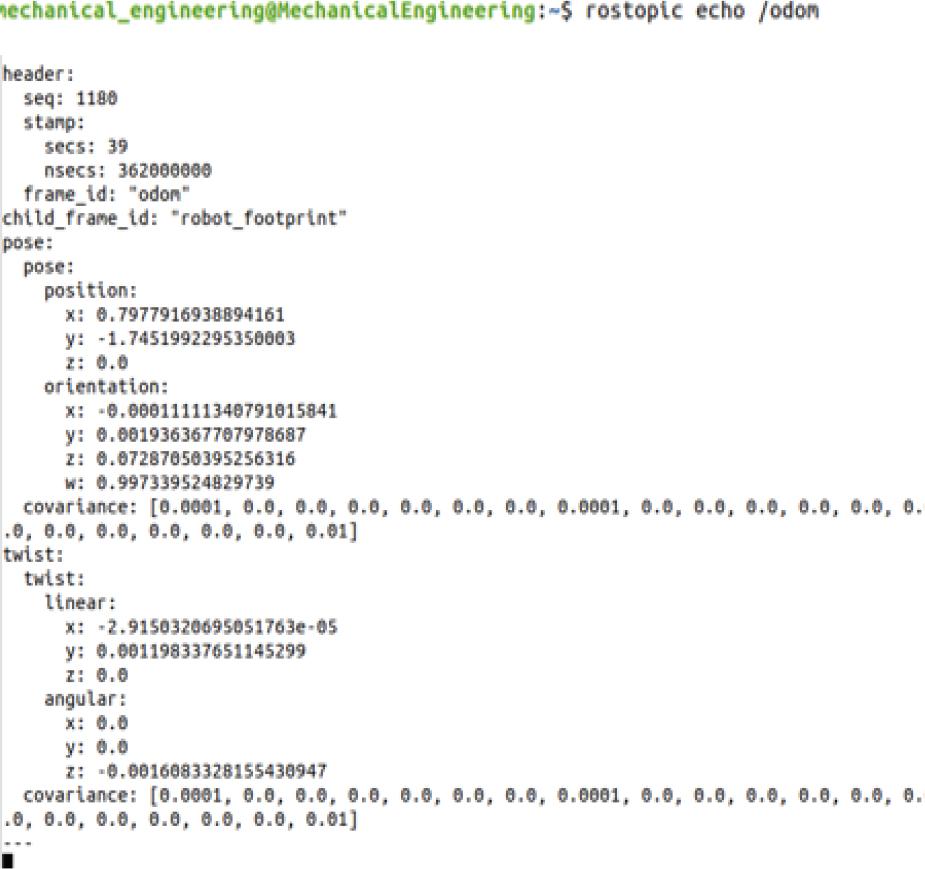
Example output of the ROS odom topic obtained during experimental validation tests performed during the development phase of the AMR system generated during real-world AMR operation
One of the biggest contributions to the performance of the AMR is its integration of a Hybrid A* algorithm, which creates dynamic path planning based on global and local environmental data. Different from conventional algorithms, Hybrid A* dynamically changes the route in real time so that the AMR can adjust the path according to obstacles perceived by sensors. Fig. 4 illustrates the robot’s movement through an environment, modifying its route as the Hybrid A* algorithm reacts to environmental changes. Comparative performance data in Table 3 highlights the efficiency of the algorithm in guiding the robot through complicated industrial areas compared to other algorithms such as Move Base. Such flexibility guarantees seamless, collision-free functionality in environments with obstacles arising unpredictably and improves the safety and efficiency of AMR.
The combination of optimized mechanical design, SLAM-based localization, and Hybrid A* pathplanning allows the AMR to operate autonomously with little supervision. The load-carrying structure provides stable material handling with energy savings, the SLAM-based mapping allows for ongoing localization in dynamic layouts, and the Hybrid A* algorithm dynamically optimizes routes. These features together allow the AMR to fulfill the demands of modern manufacturing, demonstrating an adaptive and robust intralogistics solution.
The work presented herein clearly illustrates AMR’s impressive capacity for independent movement and effective operation within intricate and multifaceted environments. This functionality offers a significant basis upon which the investigation and development of wider applications for autonomous mobile robots can be pursued, particularly in the realms of intralogistics and other associated domains.
The AMR named ProdigiMover was carefully tested with an array of intensive processes applied both in simulation environments such as Gazebo and in real-world applications.
The assessment focused on a wide range of performance metrics that are essential to the AMR’s functional application within the domain of intralogistics. These include determining transport speed, localization accuracy, payload handling ability, battery lifespan, and adaptability across varied scenarios. Pertinent figures and tables from the dissertation are effective in representing the high effectiveness and performance of the AMR within these critical parameters. These graphical representations offer clear and indepth insight into ProdigiMover’s functionality when compared to traditional AGVs, depicting its benefits and potential use in the sector.
AMR demonstrated a high level of consistency in transport speed and path accuracy in all testing phases. In virtual testing within the advanced Gazebo environment, the AMR performed excellently, recording an impressive mean transport speed of 0.5 meters per second while making little or no deviation in its path from its planned route. This performance level led to an outstanding achievement whereby it recorded a mean deviation in accuracy of less than 2 centimeters, an indicator of the precision of its navigation system. With regard to real tests performed outside the virtual world, the result was no different from the simulations, an indicator that even in more complex and dynamic environments, the AMR was still capable of an outstanding path deviation of no more than 3 centimeters. The efficacy of the Hybrid A* path-planning algorithm is demonstrated in Fig. 4, which shows the trajectories by which the AMR dynamically moves around obstacles. The paths of navigation demonstrate the AMR’s ability to maintain high accuracy, even in complex environments. Fig. 7 presents SLAM-generated maps from Gazebo simulations, which show the adherence of the AMR to planned trajectories under varying conditions.
High accuracy localization was critically important for the AMR’s autonomous navigation capabilities. By utilizing the ROS gmapping SLAM package, the AMR was able to localize with high precision, with simulation test results indicating that its error margin remained within a mere 1 cm. However, when conducting real-world testing in complicated and dynamic environments, the error margin was observed to increase up to a maximum of 2 cm. Fig. 7 also displays the high-quality maps that were generated during the Gazebo simulations, portraying the mapping capabilities of the AMR. These capabilities are fundamentally required for successful navigation through the intricate layouts that the AMR encounters. SLAM-generated map from real-world experiments can also be found in Fig 3, highlighting the accuracy of the AMR in mapping environmental data necessary for safe navigation in rapidly changing industrial layouts.
The ability of the Autonomous Mobile Robot, or AMR, to support loads is a key performance aspectthat is central to its functionality. The AMR’ complicated mechanical design ensures that it is capable of carrying payloads of up to 100 kg without sacrificing stability in the process.
In addition, detailed force and torque simulations were conducted on the AMR using sophisticated software tools such as MATLAB and ANSYS, which verified and validated the AMR’s structural integrity under these various loads. Field testing and analysis demonstrated that the AMR operated reliably and efficiently even when it was running at full capacity, thus proving its ruggedness under practical conditions. Table 3 provides force and torque values for each wheel, confirming the AMR’s structural integrity when subjected to loads. Fig. 6 also shows torque values with different slope angles and payload situations, illustrating the AMR’s capability to withstand different payloads and inclines.
Battery life was also tested so that the AMR would be prepared for the continuous operating demands found in industrial environments. Utilizing a lithiumion battery pack and battery management system, the AMR could run for as long as eight hours on one charge, which is comparable to a standard industrial labor shift. This longer battery life means significantly less downtime. Additionally, a modular design feature allows for simple battery exchanges, which allows for longer operating hours if necessary.
The AMR’s real-time navigation capabilities, powered by the advanced Hybrid A* algorithm, provide it with a decisive advantage over the older AGVs. Unlike AGVs, which rely on pre-programmed routes or external feedback mechanisms to navigate their environment, the AMR has the ability to alter its routes dynamically in real-time, continuously responding to changing sensor inputs and environmental realities. Table 5 indicates how Hybrid A* exhibits superior performance compared to its counterparts, i.e., Move Base, in the context of very dynamic environments where sophisticated collision avoidance and flexibility are required. This type of navigation flexibility enables the efficient movement of the AMRin common industrial settings with regular obstacles and layout changes.
The results of this research highlight the significant advantages of AMRs for manufacturing productivity and labor optimization. With reliable, autonomous guidance and accurate material handling, AMRs optimize intralogistics by minimizing the use of manual labor, maximizing productivity, and reducing operational downtime. By integrating a robust mechanical design with sophisticated sensor fusion and a Hybrid A* path-planning algorithm, the AMR is more flexible, accurate, and safe than conventional AGVs. Testing in both simulations and real-world environments has demonstrated the AMR’s superiority in navigation accuracy, payload handling, and energy efficiency, with the potential to optimize processes and reduce operational expenses in Industry 4.0 settings. These benefits demonstrate the influence of intelligent systems on manufacturing and suggest greater potential in a range of industries.
The robotization of material transport activities in manufacturing areas is key to enhancing their overall efficiency levels. Automated Mobile Robots, or AMRs, effectively relieve the human workers’ burden in carrying out mundane and less skill-intensive activities, transporting materials from one workstation to another. In so doing, these robots enable human workers to devote their time and energy to working on more complicated and high-value activities that require greater skills and critical thinking. This considerable alteration in the utilization of labor not only raises productivity levels across the board, but also leads to enhanced job satisfaction for employees by reducing the need for them to carry out routine and repetitive work, thus providing them with the opportunity to work on more rewarding and fulfilling tasks.
Furthermore, the streamlined design of AMR, together with its advanced battery management system and power-saving navigation, translates into extended operation periods with reduced recharging requirements. The power cycle’s synchronization with industrial shift lengths reduces downtime and ensures non-stop production flow. Modular construction also makes quick and easy maintenance possible, with more uptime and less downtime. All of these translate into meaningful time and labor cost savings that justify AMR’s value in high-demand, reliability-centric manufacturing setups.
While AMR technology was created with manufacturing in mind, it is also versatile, with cross-industry applications in healthcare, warehousing, retail, and agriculture. In healthcare, medical supplies or food could be delivered automatically by AMRs, freeing up healthcare staff to spend their time on patient care. The AMRs’ precise navigation and obstacle avoidance would be especially useful in hectic hospital settings, where they could maneuver around patients and staff without issue.
In logistics and warehousing, AMRs offer adaptability and flexibility due to their lack of fixed infrastructure requirements. Being able to adapt to changing layouts or seasonal fluctuations in demand makes them more user-friendly in dynamic storage facilities. In retail, AMRs have the potential to automate operations such as renewal of shelves and order fulfillment, making the supply chain more efficient within stores.
Agriculture would also have a use case for AMR technology in the arena of precision agriculture. Sensor and mapping algorithm-based AMRs could find an application in monitoring crops, detecting changes in plant or soil health, and even in seeding or harvesting processes. By reducing the utilization of human resources while optimizing the utilization of other resources, AMRs could bring about more sustainable methodologies and improved crop yield.
The findings herein discussed are in keeping with the increasing interest and attention afforded to intelligent systems’ wider-ranging implications for various industries.
The effective use of technologies such as SLAM, Hybrid A* path planning, and a modular design approach in this particular AMR model goes a long way in demonstrating the increasing ability of intelligent systems to operate effectively and with hardly any setup process to speak of in environments that are unstructured and human activity-oriented. Such remarkable flexibility is increasingly pertinent in these modern times, especially considering that various industries are actively seeking scalable solutions with the ability to expand and develop in tandem with the evolving needs of the marketplace and advances in technology.
When AMRs are connected to IoT networks, they can communicate with other robots, machines, and central systems, automating and optimizing processes for entire facilities. Integration can facilitate predictive maintenance, real-time analytics, and continuous optimization.
AMRs are designed to adapt to various production setups by using modular designs, navigation based on artificial intelligence, and scalable system integration. Their versatility comes from sensor fusion, dynamic mapping, and independent decision-making, which enable them to move around in structured spaces like assembly lines, or highly dynamic spaces like warehouses. AMRs’ modularity enables adaptation to specific industry needs, with swappable payloads, configurable software applications, and scalable fleet management systems. Integration must be Industry 4.0 principle-compliant, with IoT connectivity, cloud analytics, and RPA for interoperability with existing infrastructure. AMRs can be utilized in assembly lines for just-in-time material delivery, and in warehouses for maintaining inventory levels using real-time data sharing. In order to deploy efficiently, AMRs require fleet management software in the middle, smart docking stations, and integration into existing ERP systems to achieve optimal efficiency across a variety of manufacturing settings.
This research offers vital innovations in the design and realization of AMR mechanics for enhancing industrial automation solutions, with a special focus on manufacturing intralogistics. Through its efficient load-carrying mechanics, accurate SLAM-based navigation, and a novel Hybrid A* path-planning algorithm, this AMR has excellent prospects for enhancing operational efficiency, minimizing labor expenditures, and enhancing flexibility in dynamic situations.
The AMR’s self-navigating ability in complex layouts with high localization accuracy and optimum obstacle avoidance enables it to manage repetitive material transport operations, reducing the necessity for human intervention and downtime. The robot’s modular design and battery management system also allow for easy extension of its working hours.
In human-oriented spaces, AMRs can navigate dynamic areas where human movement creates uncertainty. Unlike fixed-path AGVs, they utilize real-time sensor input from LiDAR, cameras, and millimeter-wave sensors to detect obstacles and alter course.
Sensor failure and unpredictable human motion pose safety hazards; thus, strict safety precautions are implemented, including speed limits, emergency stopping, and designated safe zones. AI predictive models improve human-robot collaboration by predicting movement, minimizing the possibility of collisions, and enabling workflow integration. These actions are vital for AMRs to safely collaborate with human workers in Industry 4.0 workplaces.
Future studies can extend these contributions by investigating the potential of AMRs in other industries beyond manufacturing. When integrated with IoT networks and central control systems, AMRs can make even greater contributions to intelligent automation by delivering real-time feedback, predictive maintenance, and ongoing process optimization.
This work brings the potential and promise of AMRs in the field of industrial automation to a whole new level. It provides a basis for the innovations imminent on the horizon — innovations with the potential to completely revolutionize workflows, maximize productivity levels, and drive sustainability efforts across a range of industries. With intelligent robots set to continue developing and advancing even further, AMRs like the one created in this project present an extremely scalable and versatile solution, ideally positioned to address the increasing demands and complexities of modern industry.