

Figure 1.
Figure 2.
Figure 3.
Figure 4.
Figure 5.
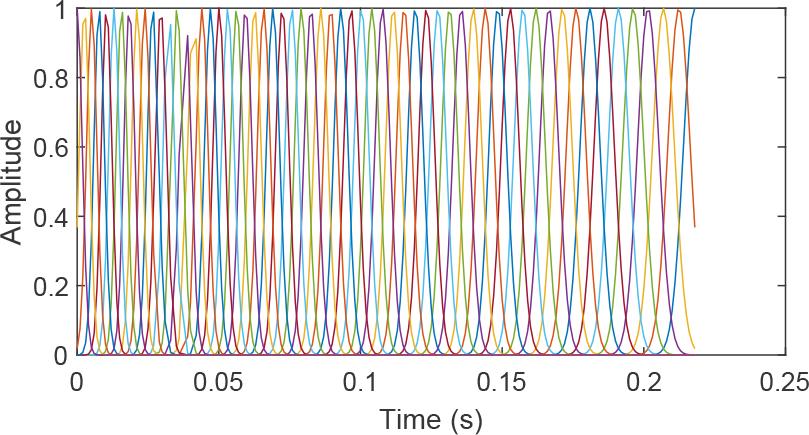
Figure 6.
Figure 7.
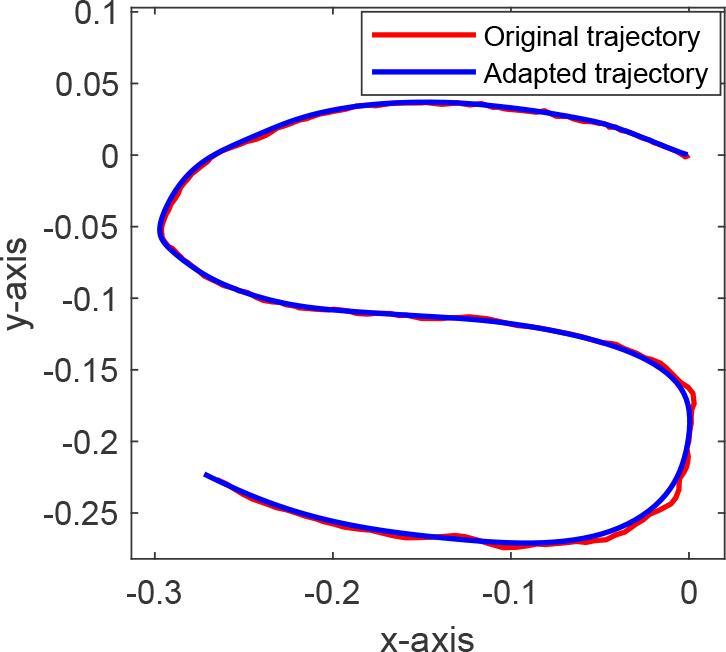
Figure 8.
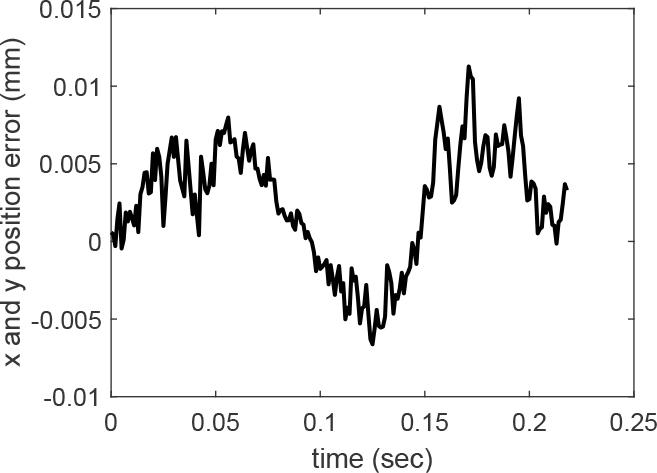
Figure 9.
Figure 10.
Figure 11.
Parameters for the LfTD Model
| Parameters | Description | Value |
|---|---|---|
| n | No. of gaussians | 60 |
| α | DMP parameter | 8.5 |
| β | DMP parameter | 4 |
| αx | Canonical system constant | 0.8 |
| τ | Time scaling constant | 0.218 |
| r | Controller adaptation rate | 100 |
| K | Adaptive controller gain | [10 16] |
| li | Robot link lengths | [50, 50] cm |
Mean Absolute Error (MAE) metrics
| Position (cm) | |
|---|---|
| yx | yy |
| 0.34 | 0.17 |