
Figure 1.
Figure 2.
Figure 3.
Figure 4.
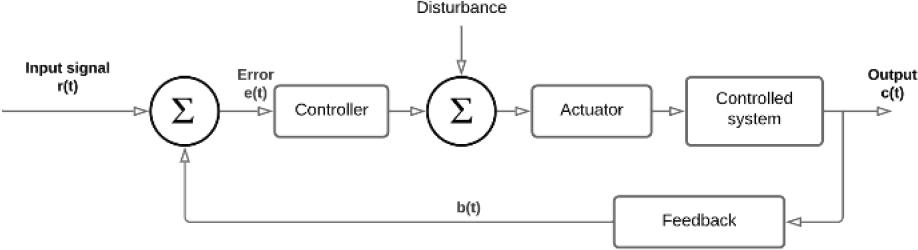
Figure 5.
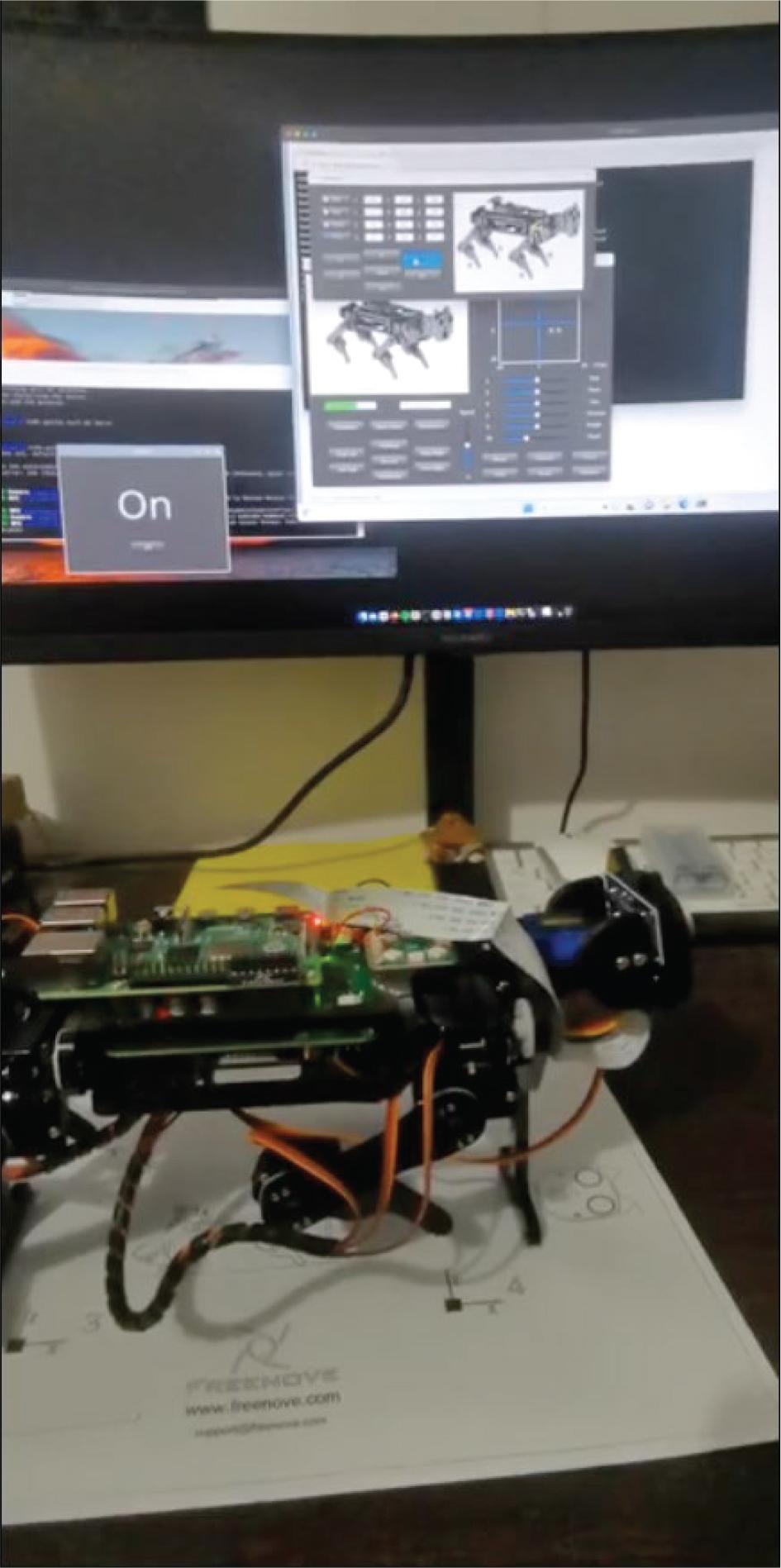
Figure 6.
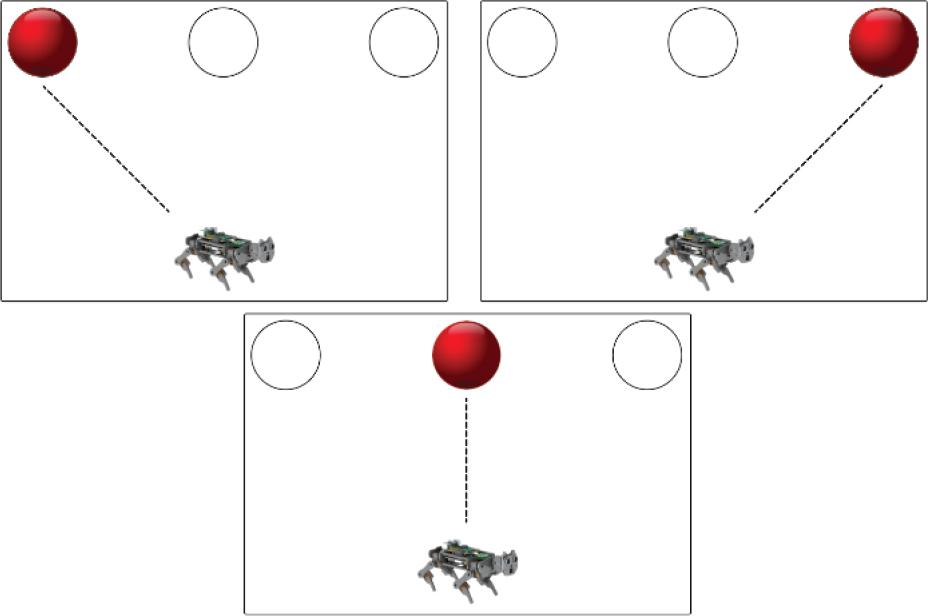
Figure 7.
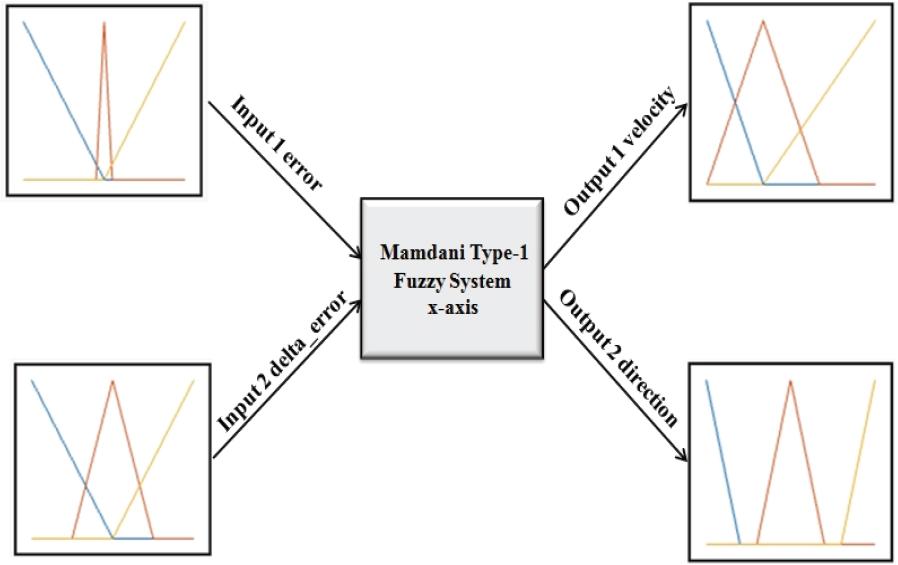
Figure 8.
Figure 9.
Figure 10.
Figure 11.
Figure 12.
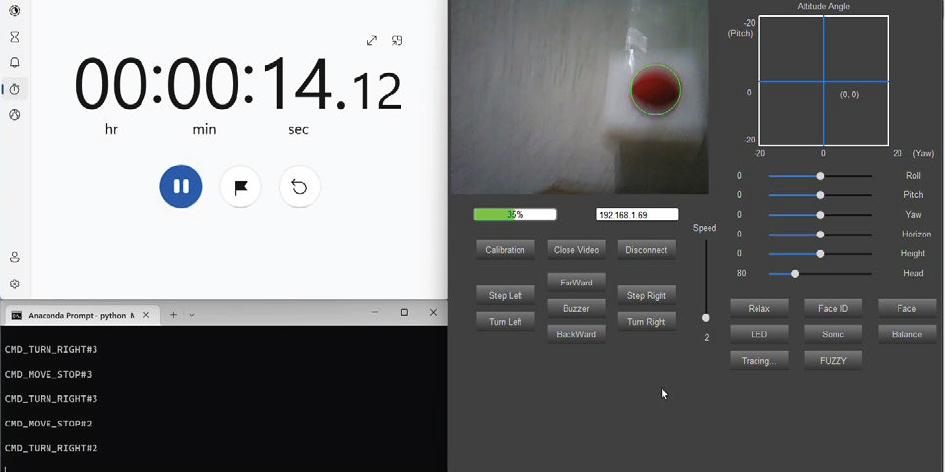
Figure 13.
Results for the experiments with 1 m
| Track of 1 m | ||
|---|---|---|
| Tests | Fuzzy PD | PID |
| 1 | 26.28 | NAO |
| 2 | 28.12 | NAO |
| 3 | NAO | |
| 4 | 36.12 | NAO |
| 5 | 26.50 | NAO |
| 6 | 33.47 | NAO |
| 7 | 30.47 | NAO |
| 8 | 27.02 | NAO |
| 9 | 32.56 | NAO |
| 10 | 35.92 | NAO |
| 11 | 22.87 | NAO |
| 12 | 31.83 | NAO |
| 13 | 33.00 | NAO |
| 14 | 31.26 | NAO |
| 15 | 33.33 | NAO |
| 16 | 27.30 | NAO |
| 17 | 29.89 | NAO |
| 18 | 20.31 | NAO |
| 19 | 23.18 | NAO |
| 20 | 33.55 | NAO |
| 21 | 25.78 | NAO |
| 22 | 36.65 | NAO |
| 23 | 25.83 | NAO |
| 24 | 31.04 | NAO |
| 25 | 23.51 | NAO |
| 26 | 38.31 | NAO |
| 27 | 32.30 | NAO |
| 28 | 26.93 | NAO |
| 29 | 36.39 | NAO |
| 30 | 33.30 | NAO |
| 31 | 26.70 | NAO |
| 32 | 32.59 | NAO |
| 33 | 28.74 | NAO |
| 34 | 31.02 | NAO |
| 35 | 33.36 | NAO |
| 36 | 27.88 | NAO |
| 37 | 28.07 | NAO |
| 38 | 23.83 | NAO |
| 39 | 29.32 | NAO |
| 40 | 28.15 | NAO |
| 29.5325 | NAO | |
| s | 4.6036 | NAO |
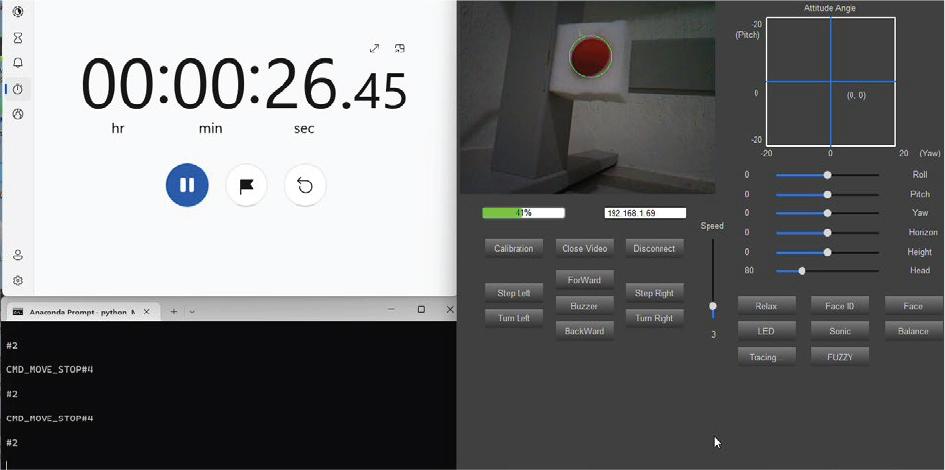
Results for the experiments with 80 cm
| Track of 80 cm | ||
|---|---|---|
| Tests | PID | Fuzzy PD |
| 1 | 26.1 | 12.45 |
| 2 | 28.39 | 12.26 |
| 3 | 24.61 | 11.54 |
| 4 | 22.43 | 11.51 |
| 5 | 26.71 | |
| 6 | 26.43 | 12.72 |
| 7 | 22.73 | 10.63 |
| 8 | 21.04 | 11.16 |
| 9 | 20.05 | 13.87 |
| 10 | 15.84 | |
| 11 | 22.71 | 13.52 |
| 12 | 22.91 | 12.70 |
| 13 | 20.76 | 14.55 |
| 14 | 21.36 | 12.66 |
| 15 | 30.03 | 13.39 |
| 16 | 25.47 | 14.07 |
| 17 | 23.00 | 17.08 |
| 18 | 21.43 | 16.62 |
| 19 | 24.01 | 12.71 |
| 20 | 26.51 | 15.32 |
| 21 | 27.09 | 13.42 |
| 22 | 20.82 | 15.71 |
| 23 | 23.97 | 14.47 |
| 24 | 26.47 | 13.63 |
| 25 | 24.78 | 14.84 |
| 26 | 24.56 | 12.77 |
| 27 | 23.11 | 14.16 |
| 28 | 27.17 | 13.89 |
| 29 | 29.47 | 14.69 |
| 30 | 22.63 | 11.90 |
| s | 24.2056 | 13.4796 |
| 2.8009 | 1.6871 | |