
Figure 1.
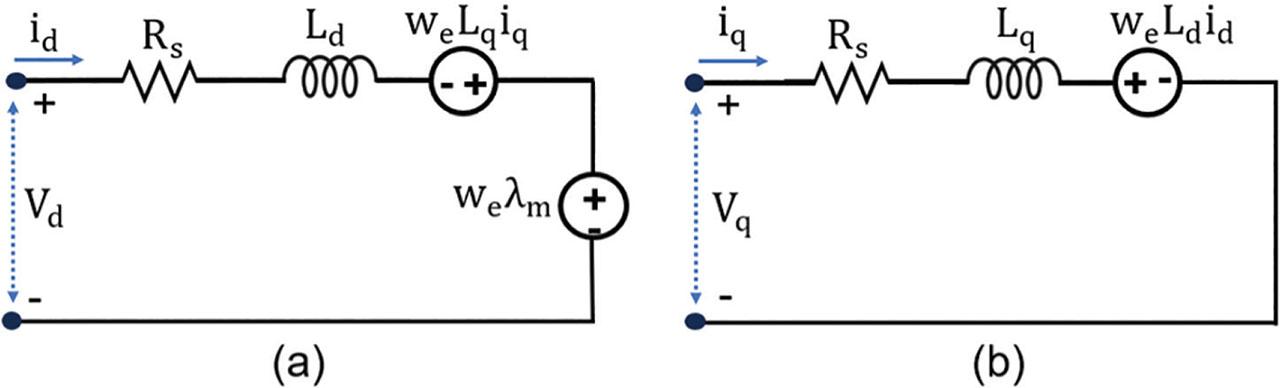
Figure 2.
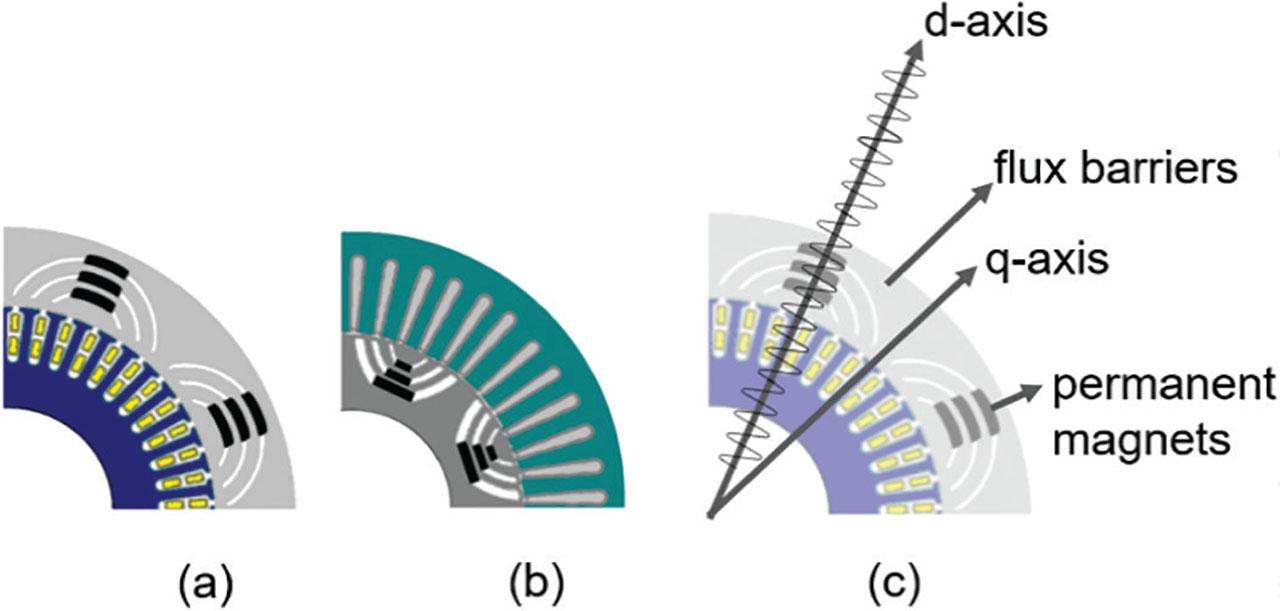
Figure 3.
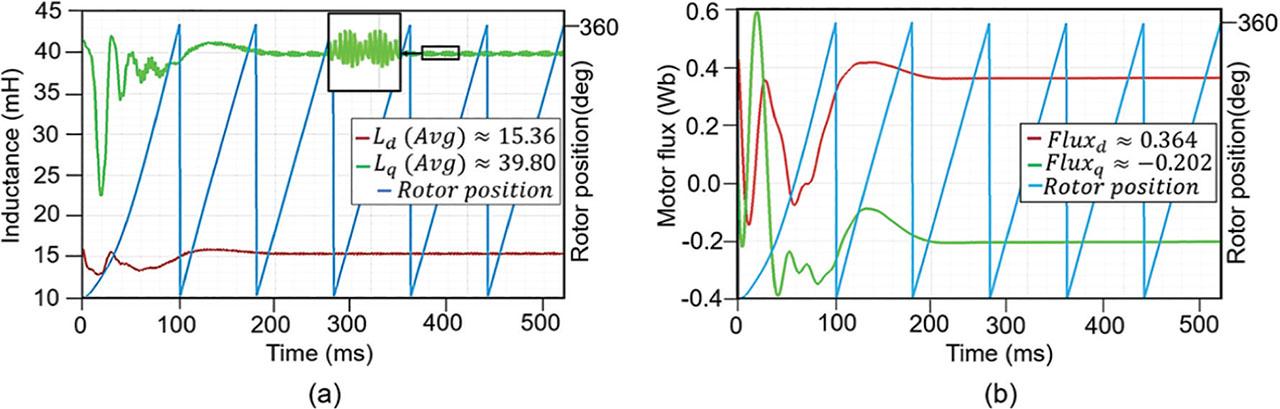
Figure 4.
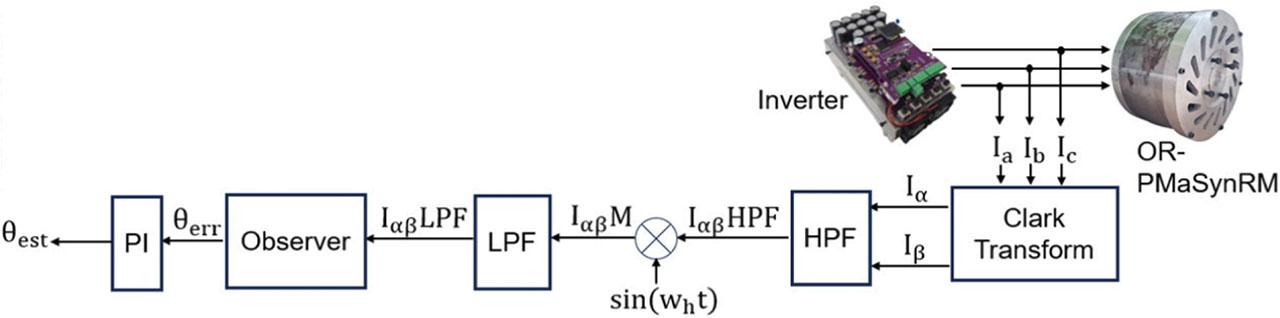
Figure 5.
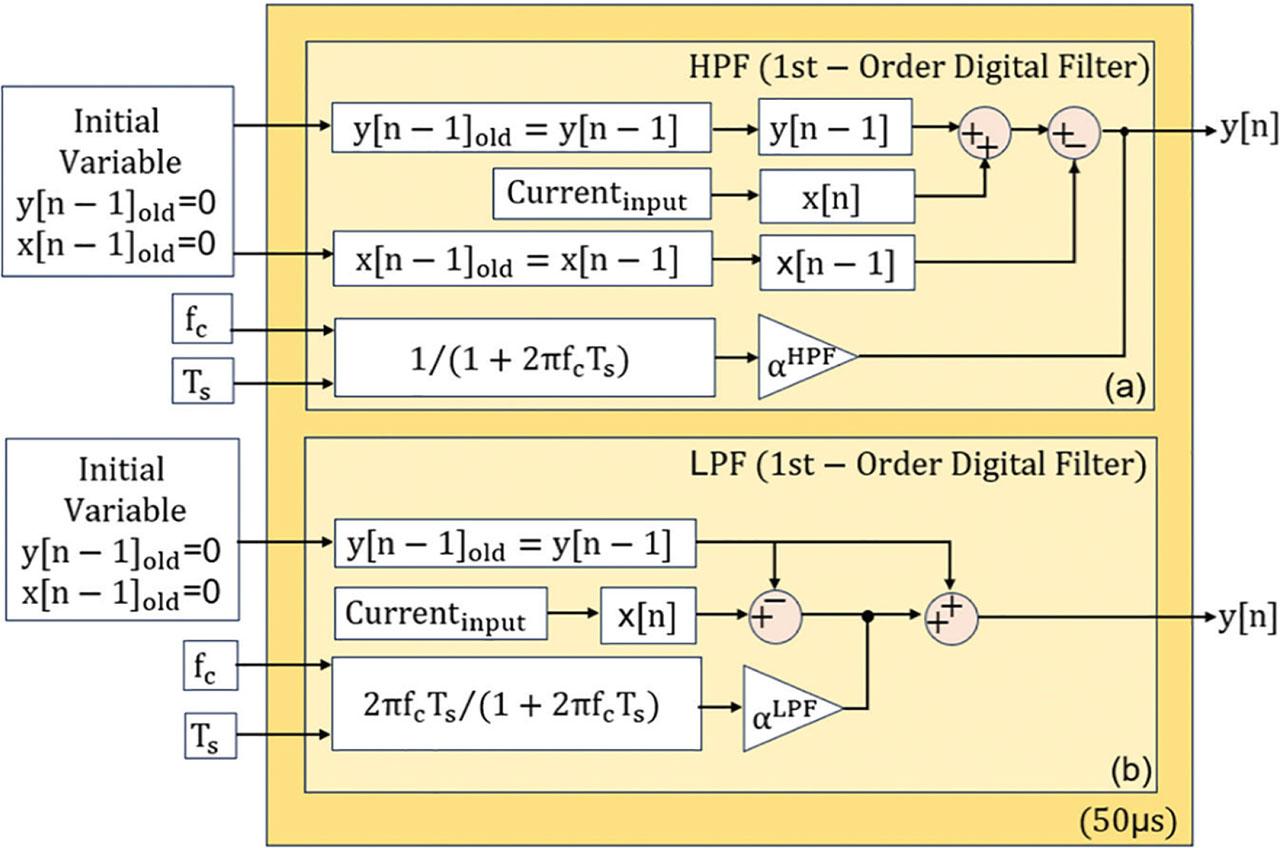
Figure 6.
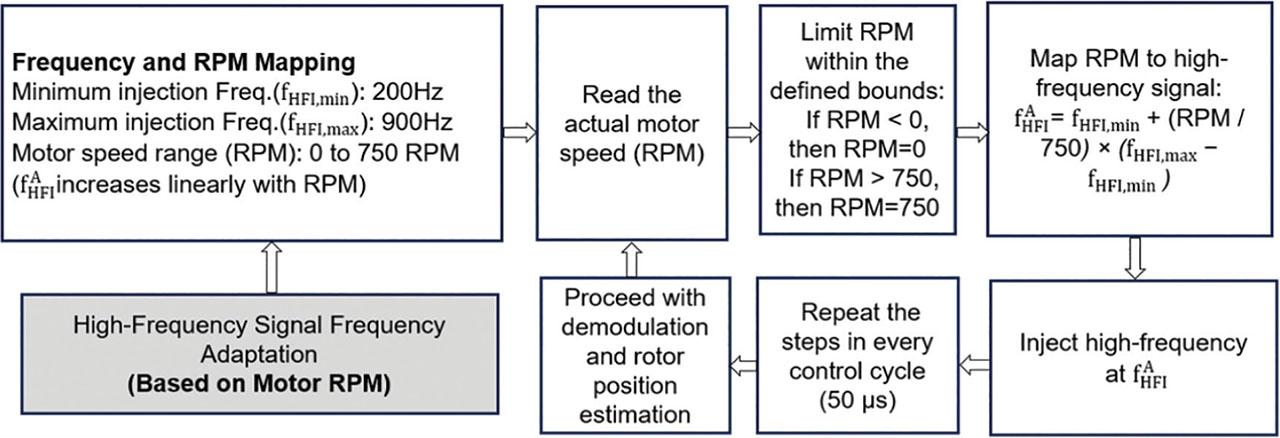
Figure 7.
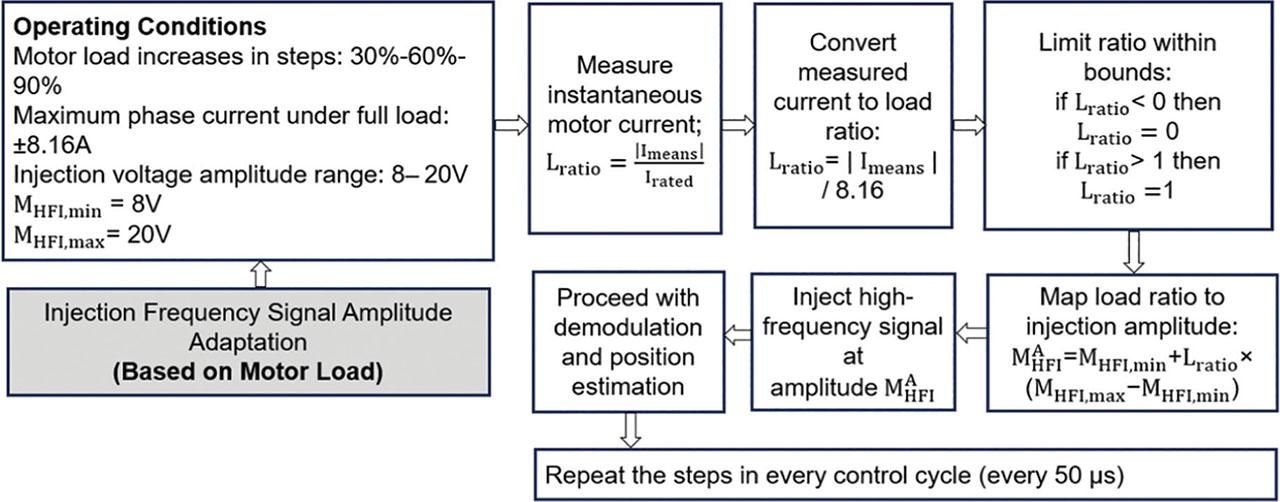
Figure 8.
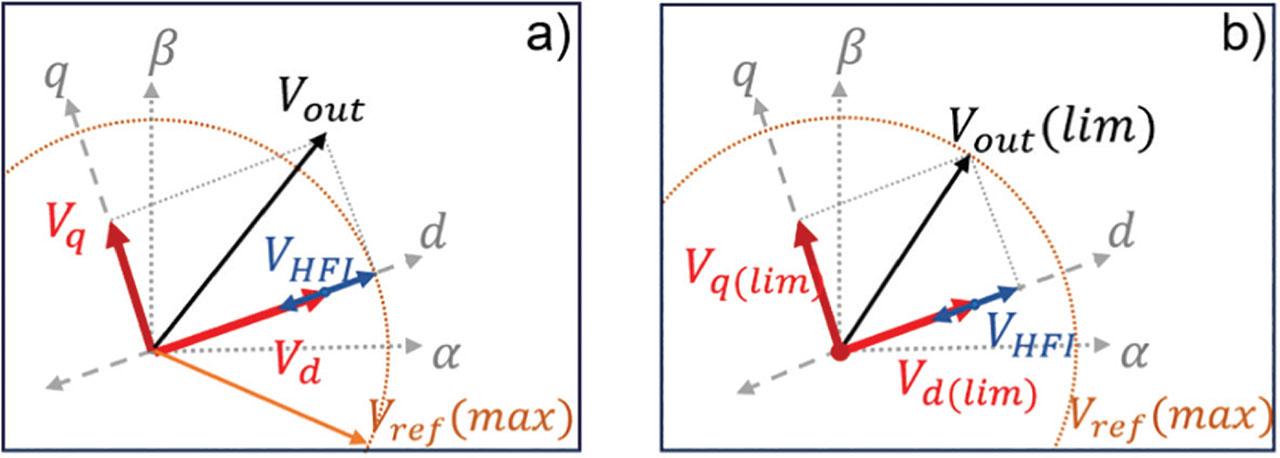
Figure 9.
Figure 10.
Figure 11.
Figure 12.
Figure 13.
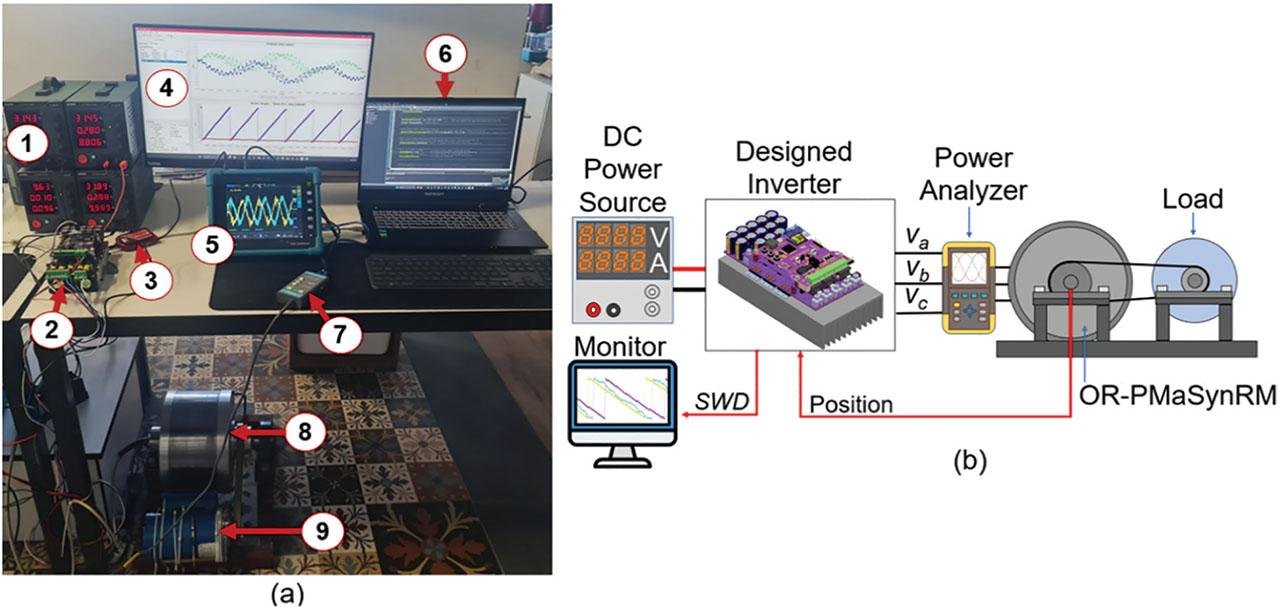
Figure 14.
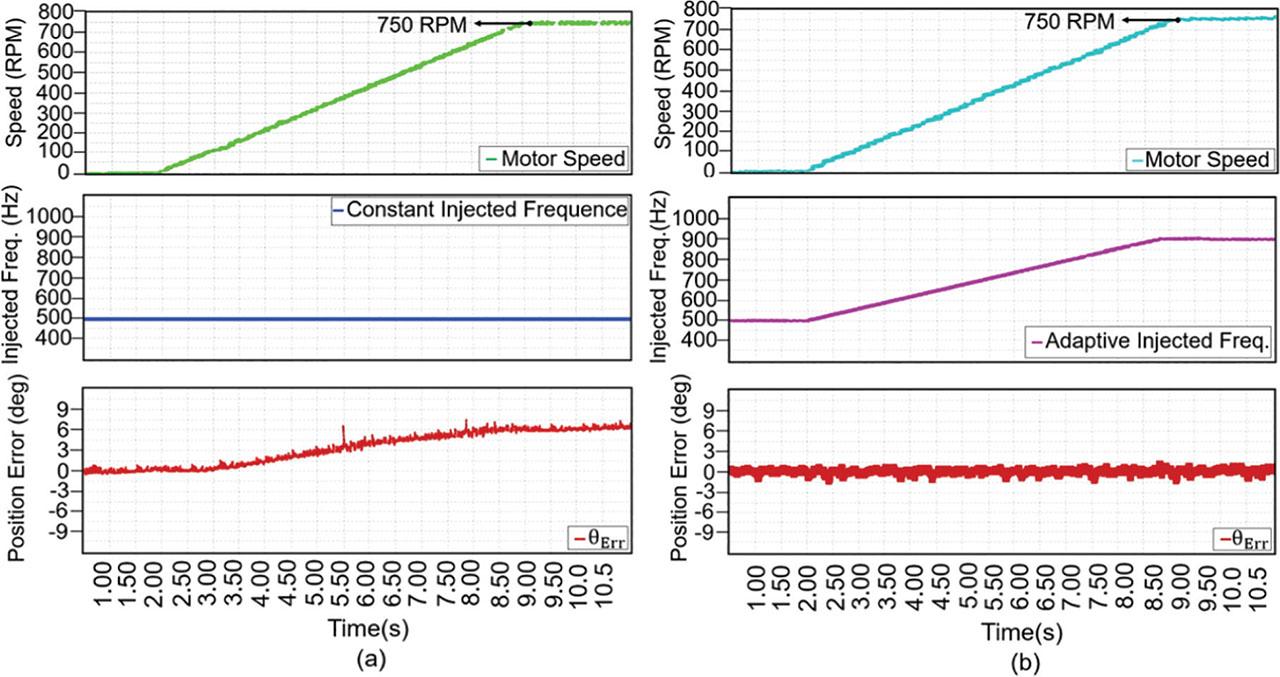
Figure 15.
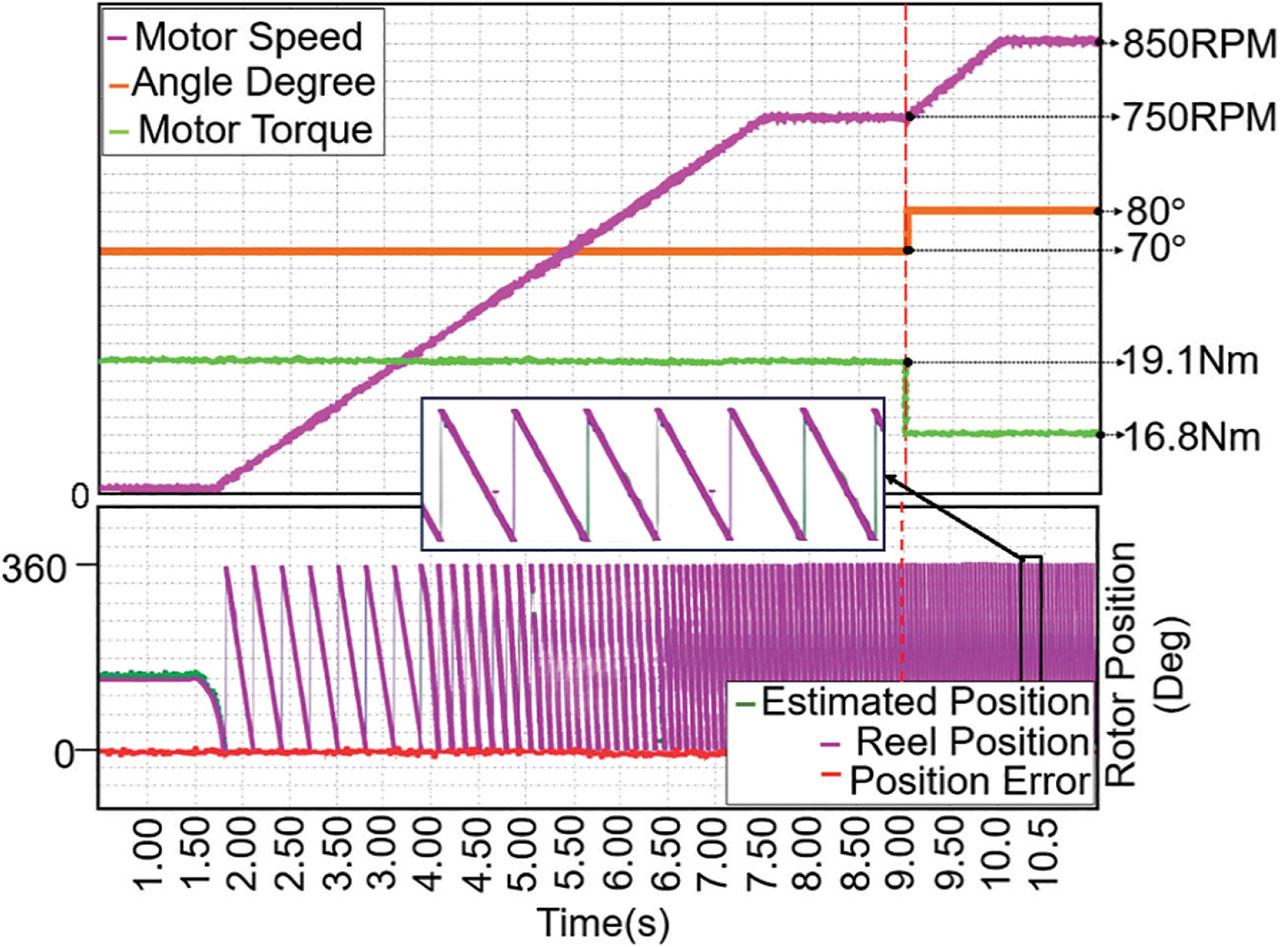
Figure 16.
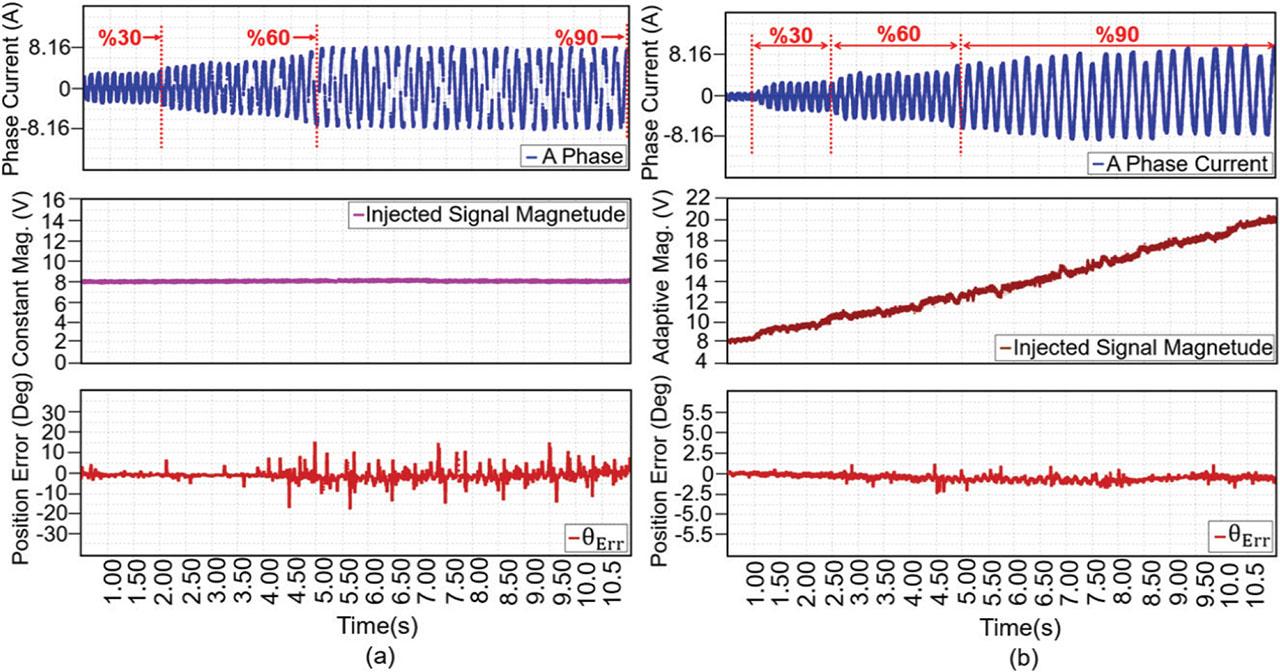
Figure 17.
Figure 18.
Figure 19.
Figure 20.
Figure 21.
Figure 22.
Figure 23.
Experimental hardware specifications_
| Parameter | Value |
|---|---|
| Microcontroller | STM32F407VG (168 MHz, ARM Cortex-M4F [32-bit]) |
| DC bus voltage (Vin) | 90 VDC |
| Current sensor type | GHS 20-SME |
| Current sensor output sensitivity | 40 mV/A (typical) |
| Current sensing resolution | 12-bit ADC |
| Position sensor (for validation only) | MA702, 14-bit magnetic encoder |
| Cooling method | Aluminium heatsink and fan |
Experimental software specifications_
| Parameter | Value |
|---|---|
| Control method | FOC, HFI |
| HFI injection axis | d-axis only |
| Filter type (demodulation) | HPF and LPF (first-order digital) |
| Angle estimation method | PLL-based estimator with PI compensation |
| RMS angle error evaluation | RMSE |
| PWM switching frequency | 15 kHz |
| Proportional and integral gain values for the d-axis current controller
|
|
| Proportional and integral gain values for the q-axis current controller
|
|
Specifications of the OR-PmaSynRM_
| Parameter | Value | Unit |
|---|---|---|
| Phase voltage | 90 | VRMS |
| Rated current | 5.741 | ARMS |
| Reactive power | 313 | VAR |
| Output power | 1500 | W |
| Input power | 1639 | VA |
| Efficiency | 91.51 | % |
| Rated speed | 750 | RPM |
| Frequency | 50 | Hz |
| Load torque | 19.1 | Nm |
Boundaries of adaptive control parameters_
| Control parameter | Adaptation variable | Operating range | Adaptive range |
|---|---|---|---|
| Adaptive injection frequency
| Motor speed (RPM) | 0–750 RPM | 200–900 Hz |
| Adaptive injection amplitude
| Load ratio (%) | 30%–60%–90% | 8–20 V |
| Adaptive filter cut-off frequency |
| – | 200–900 Hz |
| Reference voltage limit
|
| – | 45–49 V |
RMS position error under different operating conditions_
| Test condition | Motor speed (RPM) | Load torque (Nm) | RMS error (°electrical) | Standard deviation (°electrical) | Max error (°electrical) |
|---|---|---|---|---|---|
| Low speed, light load | 150 | ≈5.7 | 1.10 | ±0.02 | 1.23 |
| Medium speed, nominal load | 450 | ≈11.5 | 1.12 | ±0.02 | 1.28 |
| High speed, high load | 750 | ≈17.2 | 1.15 | ±0.03 | 1.35 |
Comparison of rotor position estimation errors reported in various studies_
| Study | Motor type | Control method | Estimation method | Average RMS error (electrical degrees) |
|---|---|---|---|---|
| Method in Chen et al. (2024a) | PMSM | FOC | Adaptive BPF + HFI | ≈1.2° |
| Method in Tap et al. (2023) | PmaSynRM | FOC | Adaptive HFI + modified PLL | ≈1°–1.5° |
| Method in Lu et al. (2018) | IPMSM | FOC | Adaptive frequency & amplitude HFI | <3° |
| Method in Chen and Liu (2012) | IPMSM | FOC | HFI | ≈±2° |
| Method in Tongxing et al. (2019) | PMSM | FOC | Frequency self-optimized HFI + PLL | ≈±14.4° |
| Method in Kumar et al. (2019) | IPMSM | FOC | HFI + Self-adaptive PLL + adaptive amplitude | ≈1.5° |
| My work | OR-PmaSynRM | FOC | HFI + adaptive frequency + adaptive amplitude + proposed voltage limiting | ±1.15° |