

Figure 1.
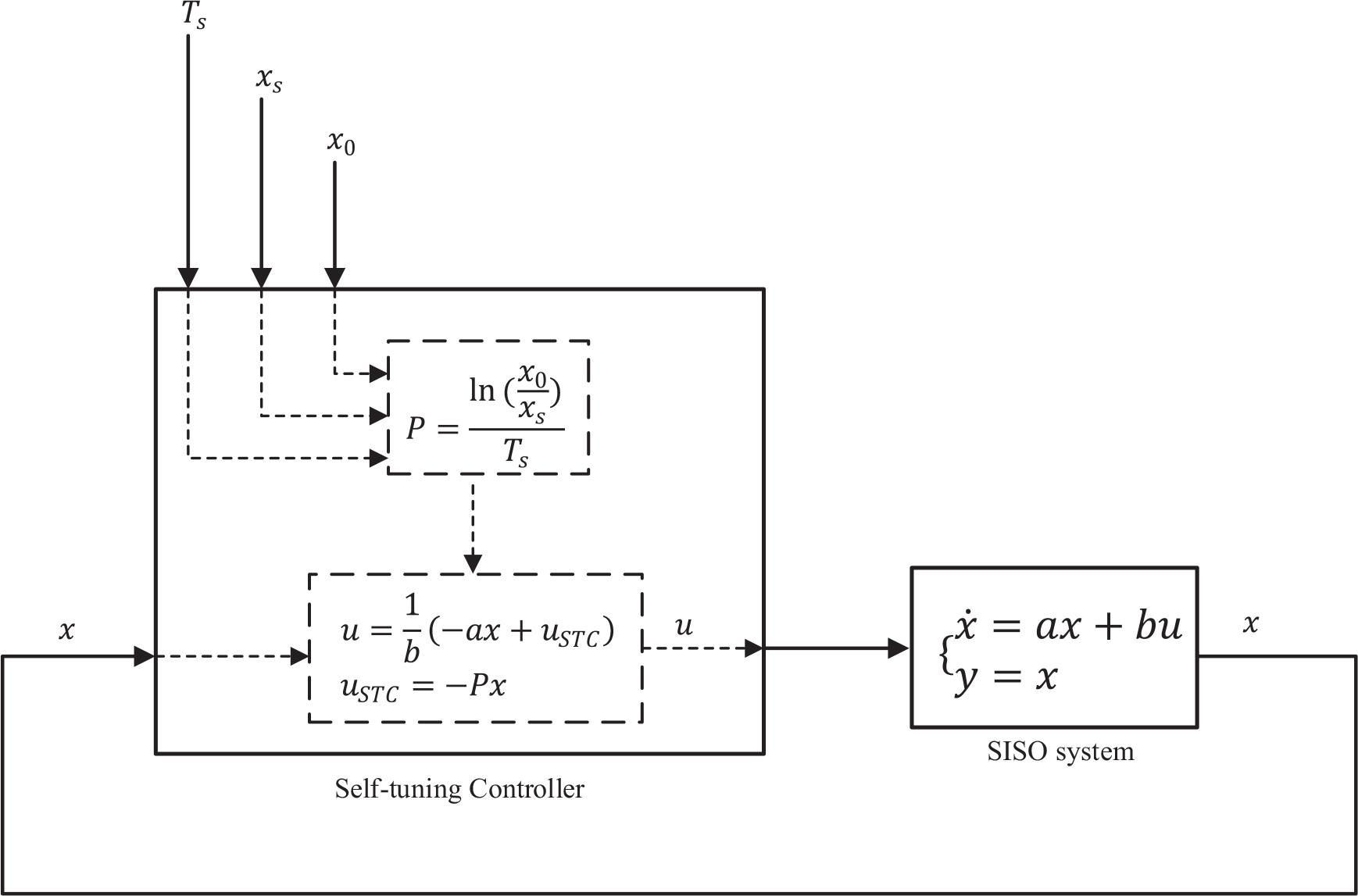
Figure 2.
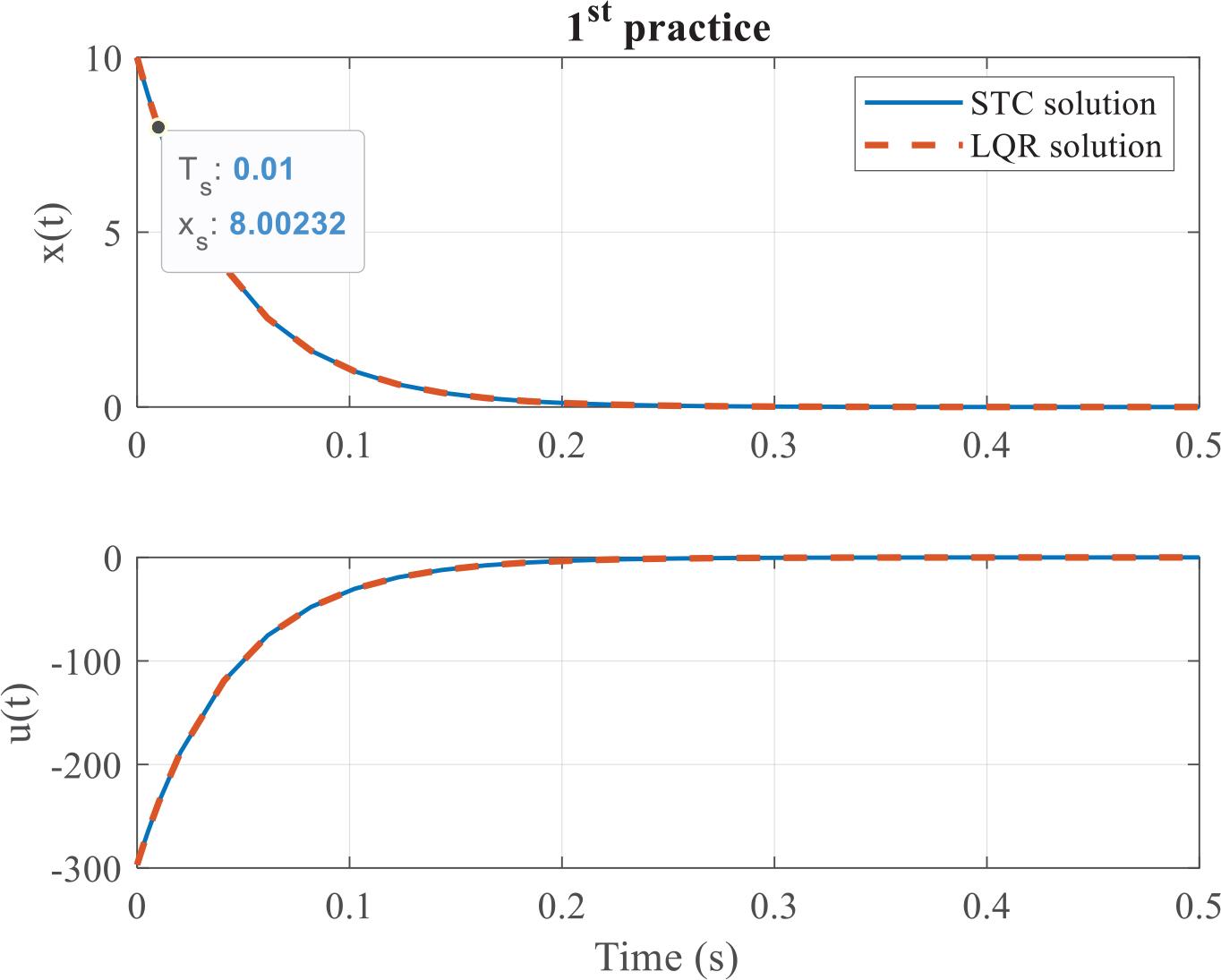
Figure 3.
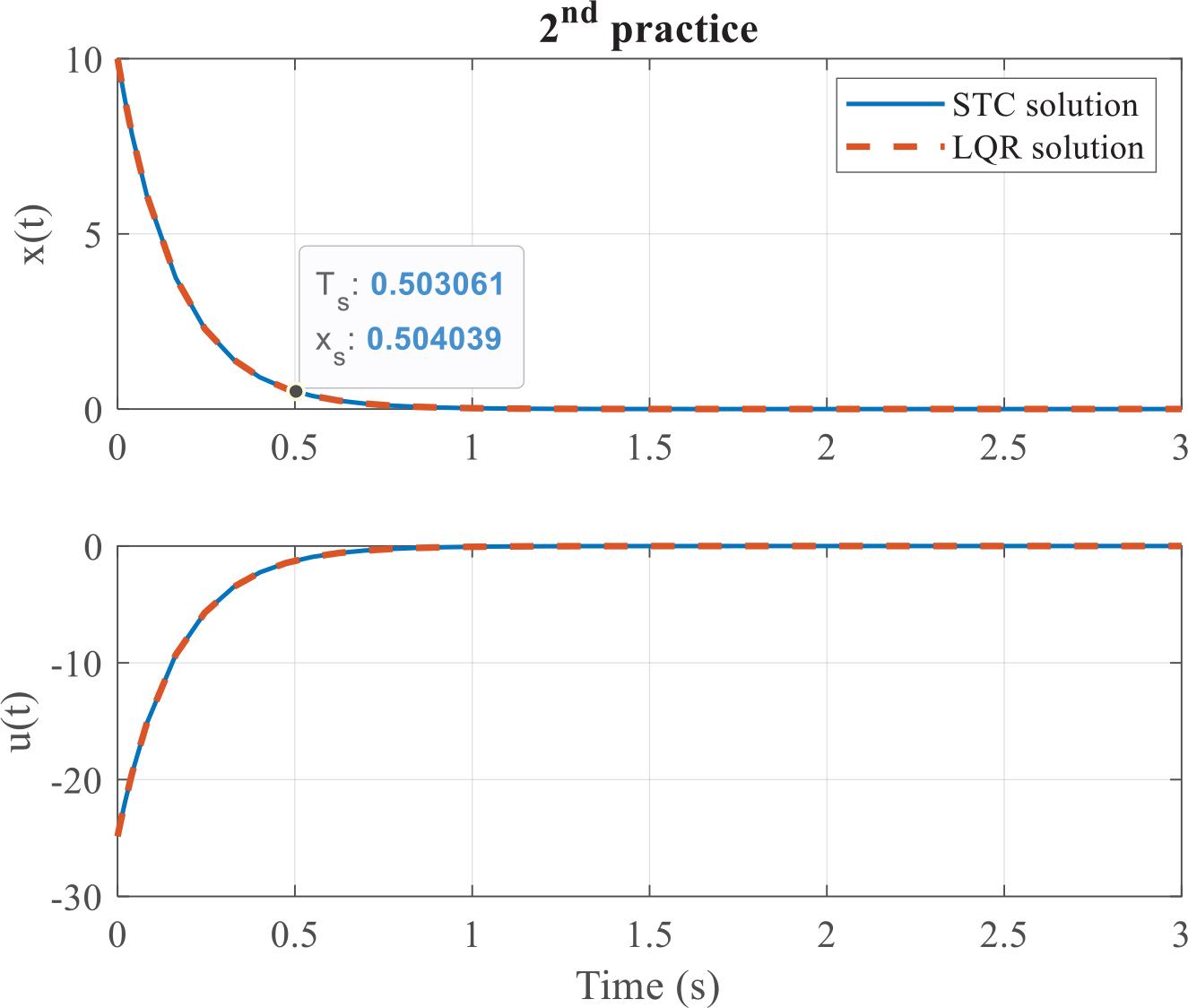
Figure 4.
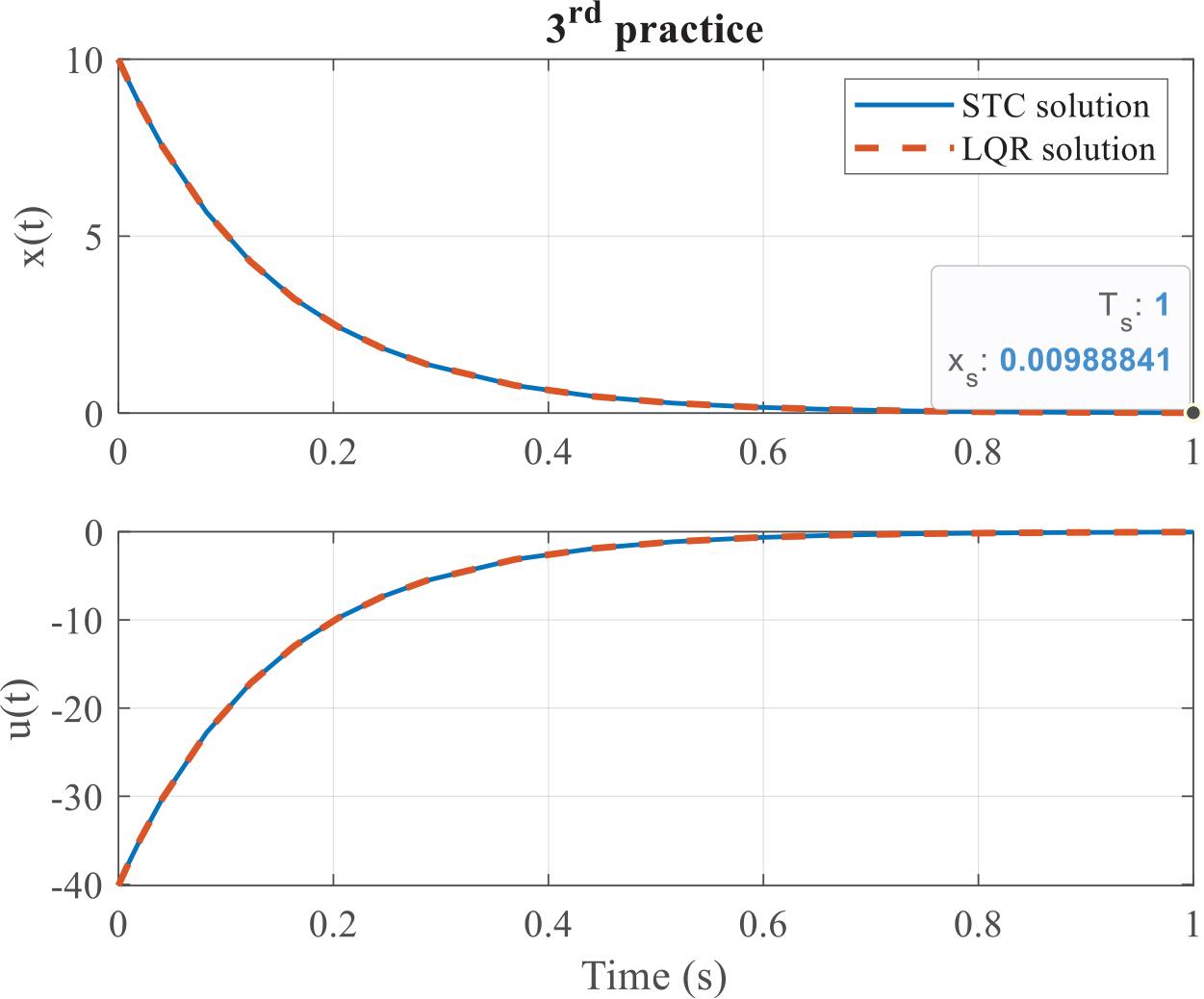
Figure 5.
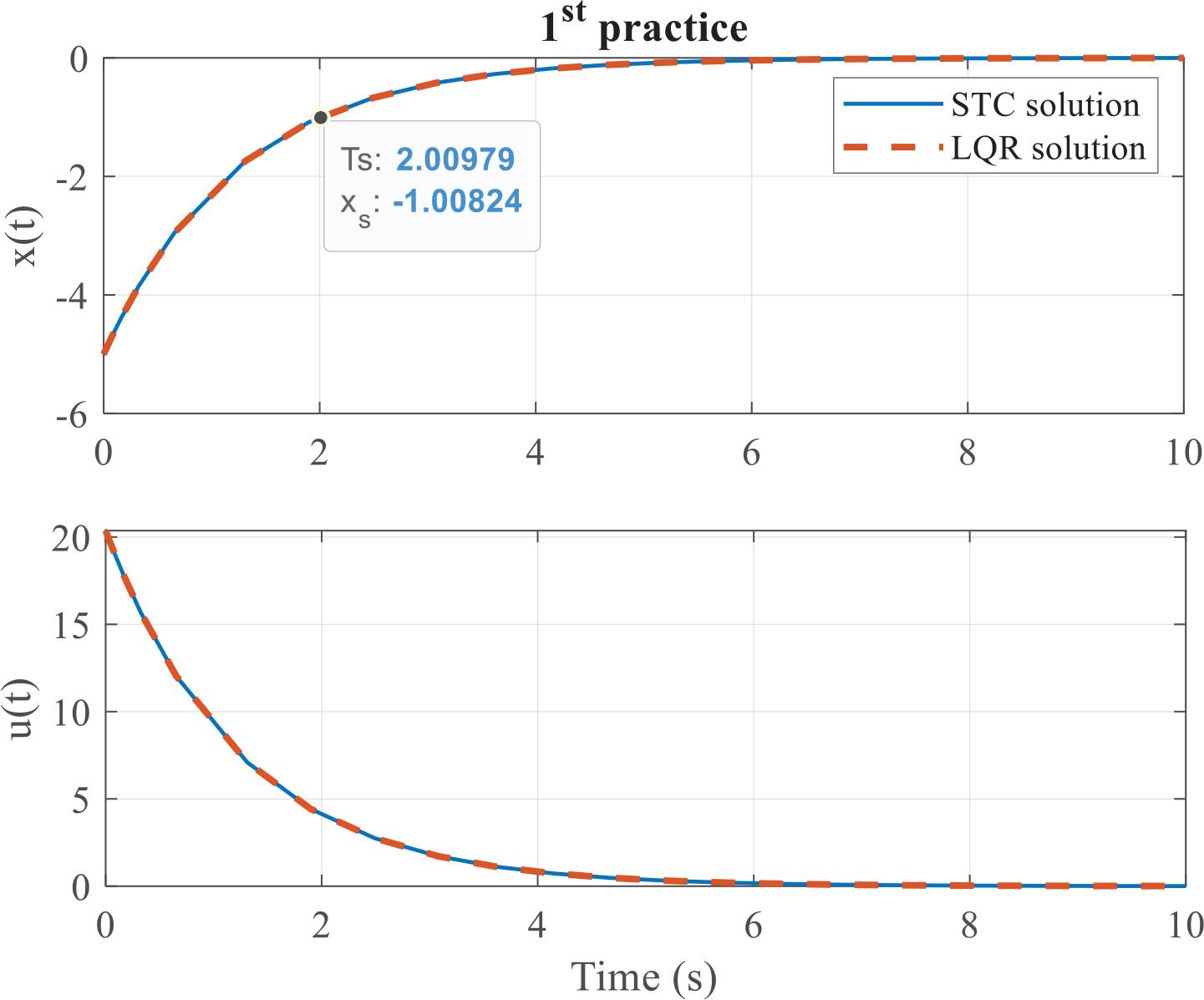
Figure 6.
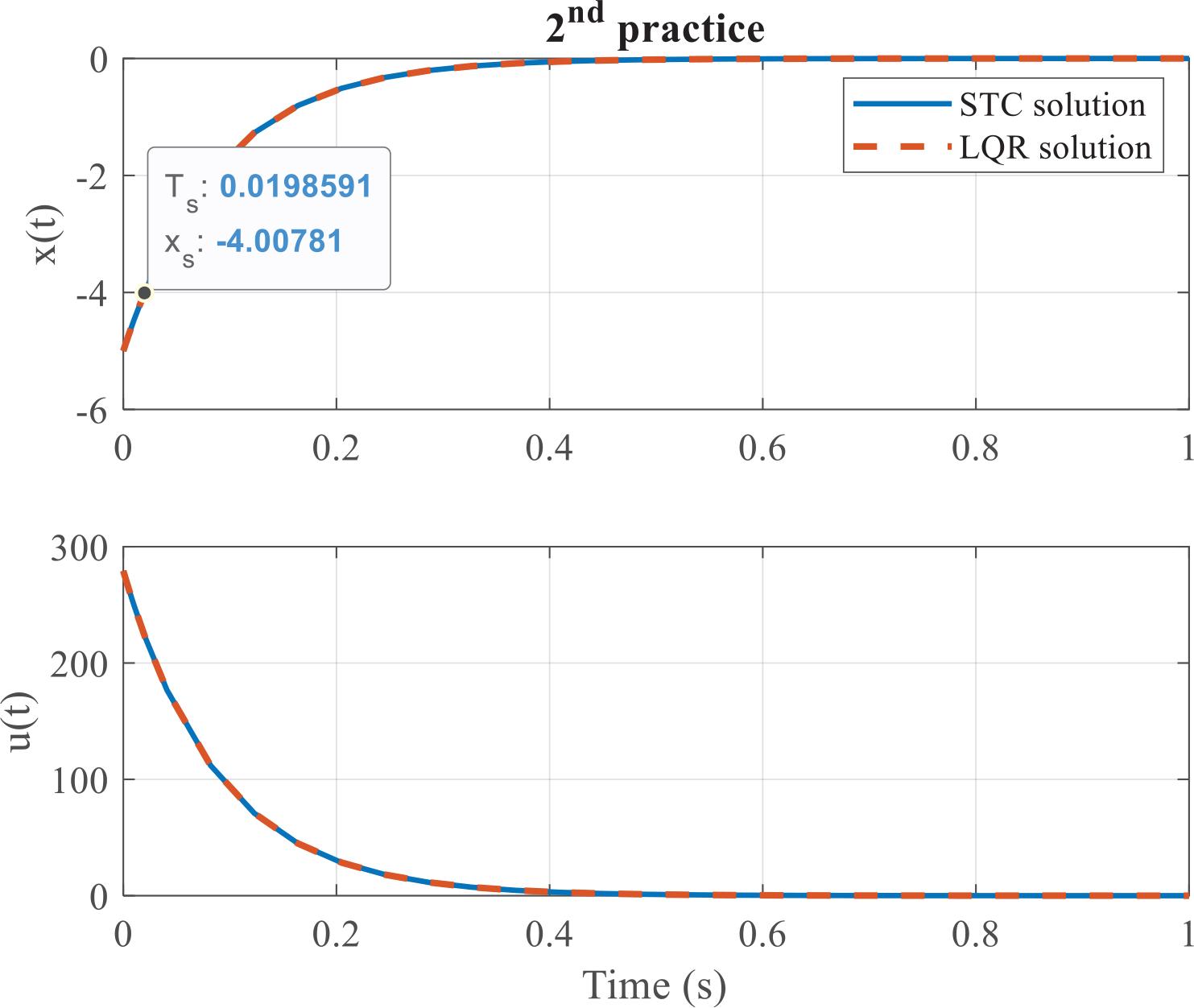
Figure 7.
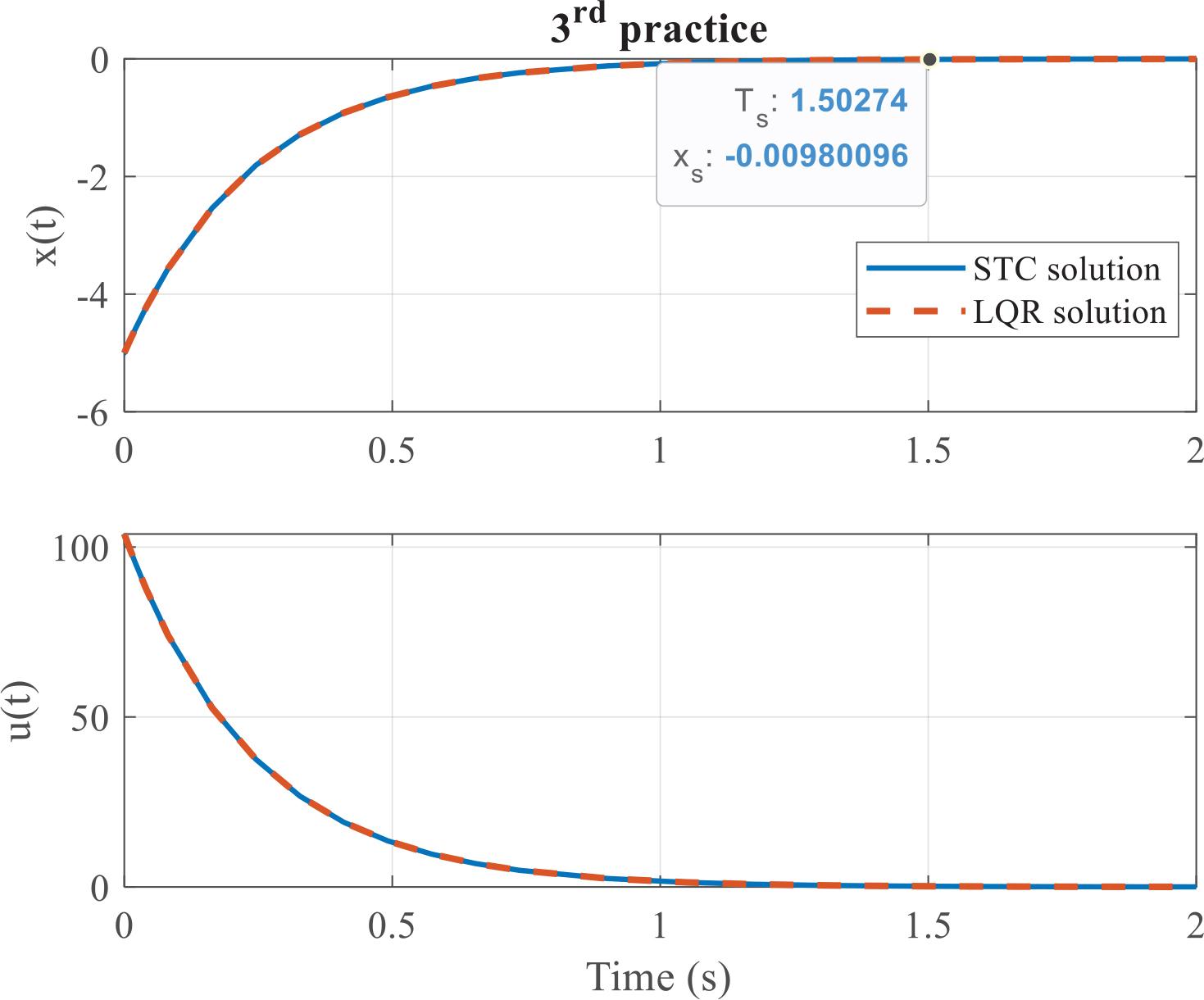
Figure 8.
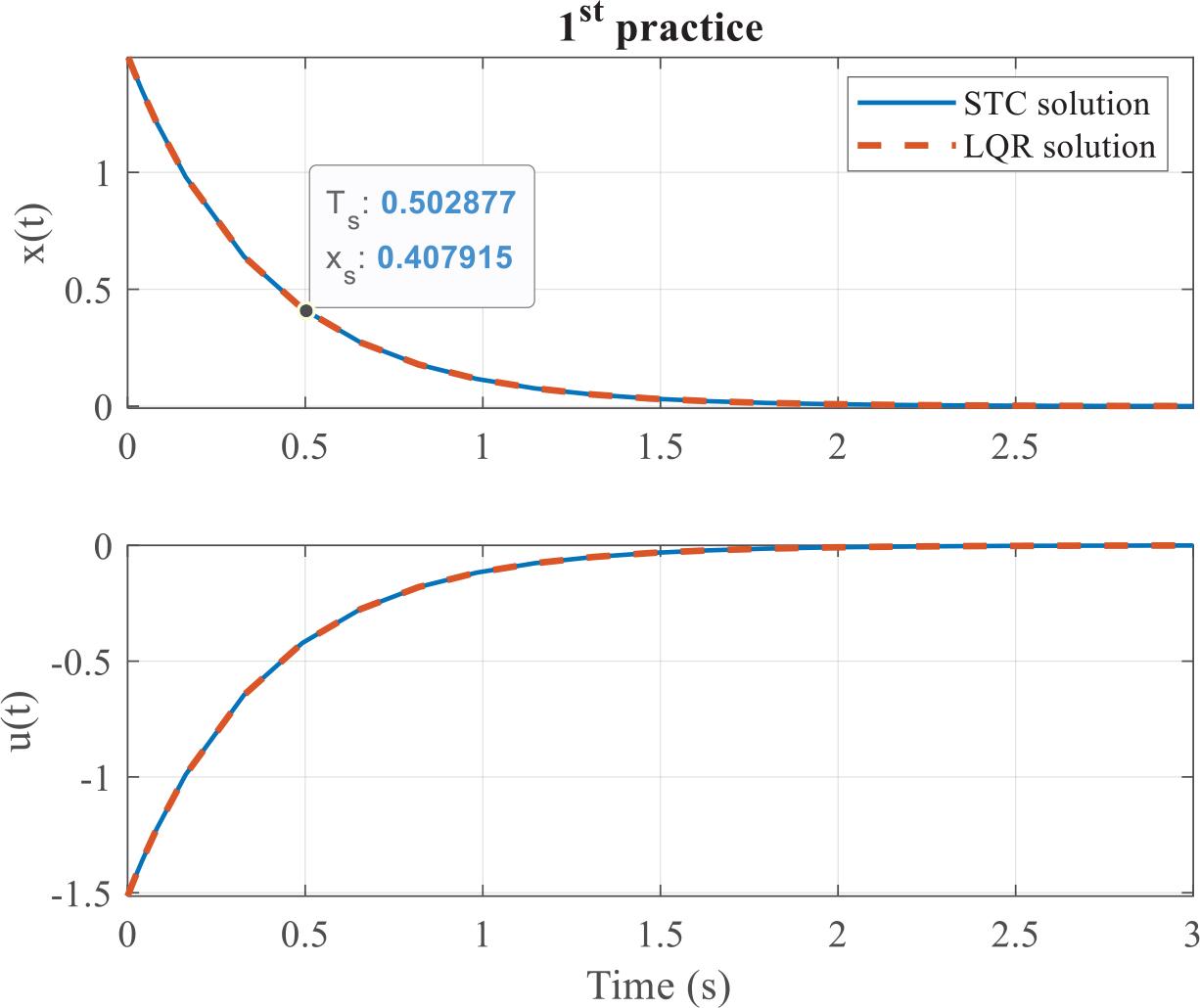
Figure 9.
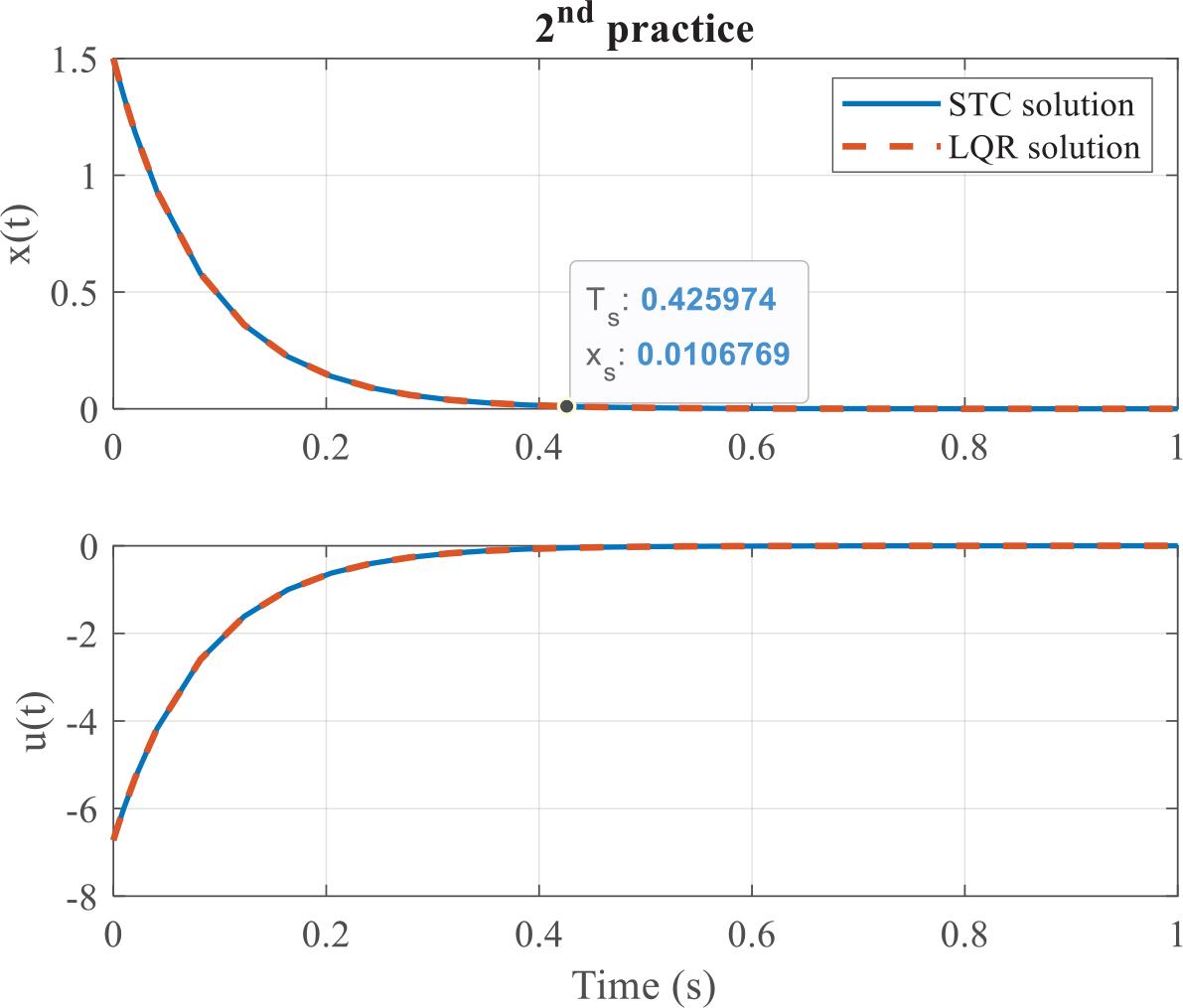
Figure 10.
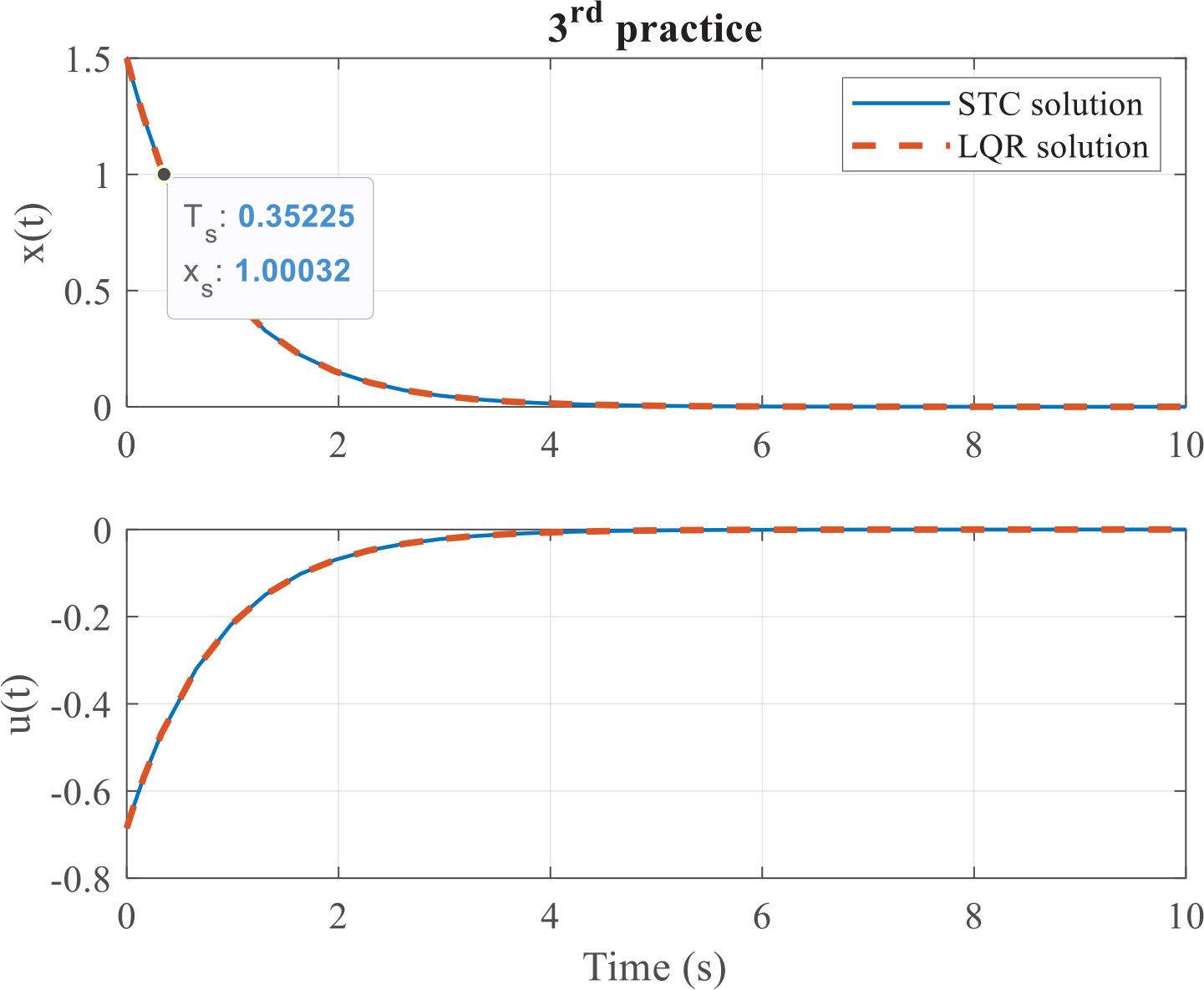
Figure 11.
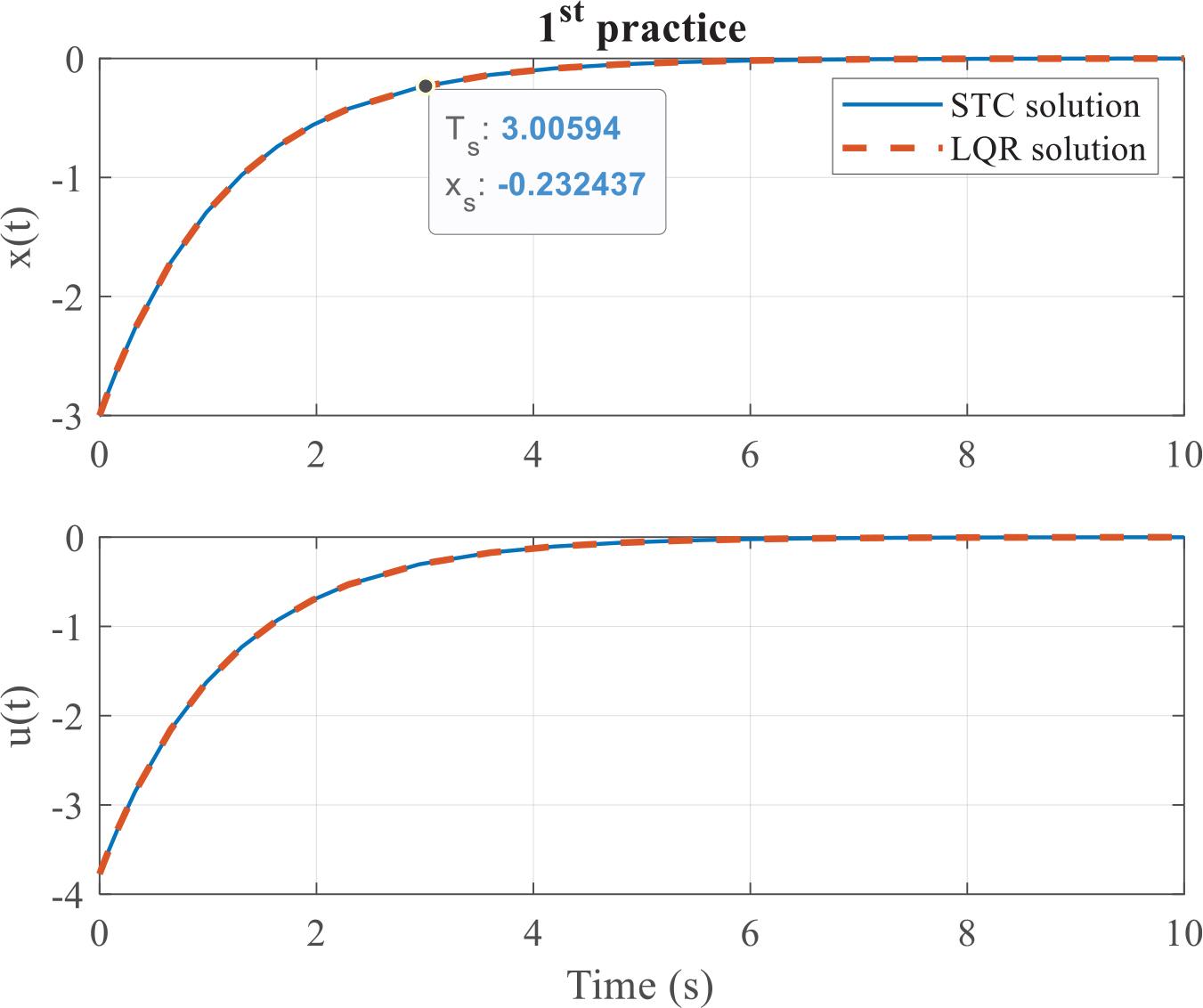
Figure 12.
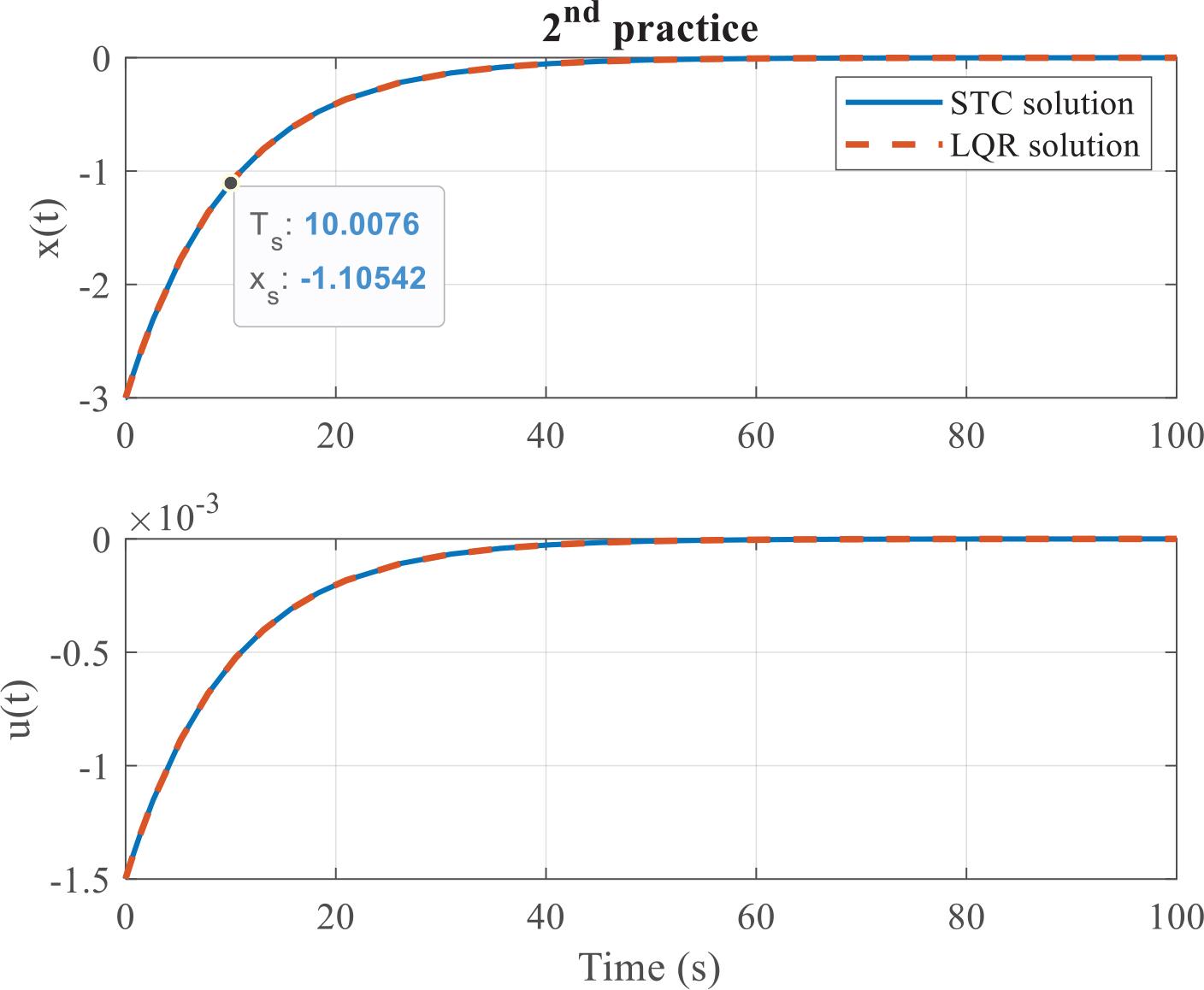
Figure 13.
Parameters in different practices of the first scenario
| Practices | Parameters Selected by the User | Parameters Calculated by the STC Method | Calculated Values of the Cost Functions | |||||
|---|---|---|---|---|---|---|---|---|
| xs | Ts | R | Q | P | JSTC | JLQR | JPID | |
| 1st | 8 | 0.1 | 10 | 13268.90 | 22.31 | 5.11 × 104 | 5.11 × 104 | 5.70 × 104 |
| 2nd | 0.5 | 0.5 | 1 | 43.47 | 5.991 | 428.9 | 428.9 | 1015.8 |
| 3rd | 0.01 | 1 | 0.1 | 7.63 | 6.908 | 68.08 | 68.08 | 113.57 |
Parameters in different practices of the second scenario
| Practices | Parameters Selected by the User | Parameters Calculated by the STC Method | Calculated Values of the Cost Functions | |||||
|---|---|---|---|---|---|---|---|---|
| xs | Ts | Q | R | P | JSTC | JLQR | JPID | |
| 1st | –1 | 2 | 8.093 | 0.5 | 0.8047 | 263.9 | 263.9 | 513.41 |
| 2nd | –4 | 0.02 | 311206.2 | 100 | 11.16 | 720678.15 | 720678.15 | 1366900 |
| 3rd | –0.01 | 1.5 | 4.291 | 0.01 | 4.143 | 26.53 | 26.53 | 27.1698 |
Parameters in different practices of the third scenario
| Practices | Parameters Selected by the User | Parameters Calculated by the STC Method | Calculated Values of the Cost Functions | |||||
|---|---|---|---|---|---|---|---|---|
| xs | Q | R | Ts | P | JSTC | JLQR | JPID | |
| 1st | 0.5 | 1 | 1 | 0.40 | 2.6 | 0.8997 | 0.8997 | 6.6644 |
| 2nd | 0.01 | 4 | 0.2 | 0.42 | 11.63 | 0.8022 | 0.8022 | 1.4403 |
| 3rd | 1 | 0.04 | 0.2 | 0.35 | 1.163 | 0.08111 | 0.08111 | 1.3284 |
Parameters in different practices of the fourth scenario
| Practices | Parameters Selected by the User | Parameters Calculated by the STC Method | Calculated Values of the Cost Functions | |||||
|---|---|---|---|---|---|---|---|---|
| Q | R | Ts | xs | P | JSTC | JLQR | JPID | |
| 1st | 4 | 2 | 3 | –0.23 | 0.8544 | 38.39 | 38.39 | 62.4464 |
| 2nd | 0.01 | 60 | 10 | –1.1 | 0.1003 | 0.4563 | 0.4563 | 102.9896 |
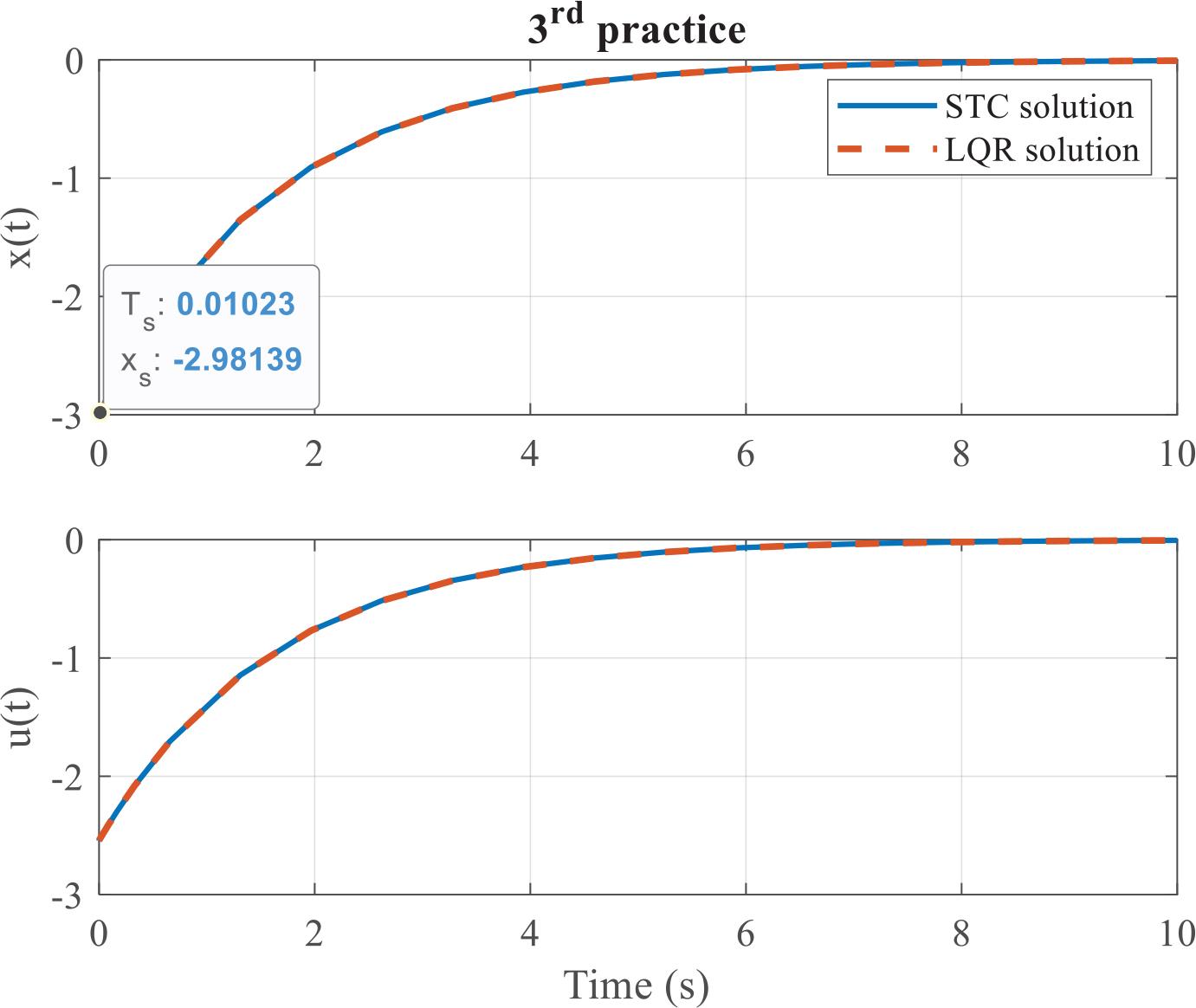
| 3rd | 1 | 1 | 0.01 | –2.982 | 0.6083 | 13.05 | 13.05 | 16.4667 |