
Figure 1.
Figure 2.
Figure 3.
Figure 4.
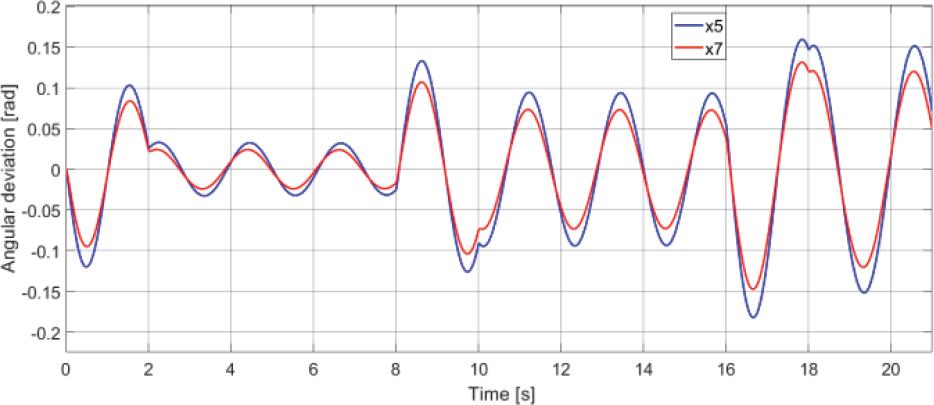
Figure 5.
Figure 6.
Figure 7.
Figure 8.
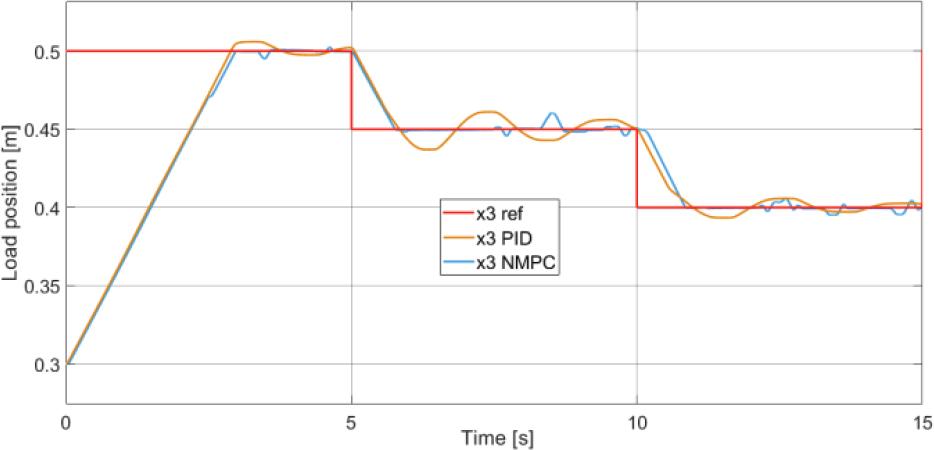
Figure 9.
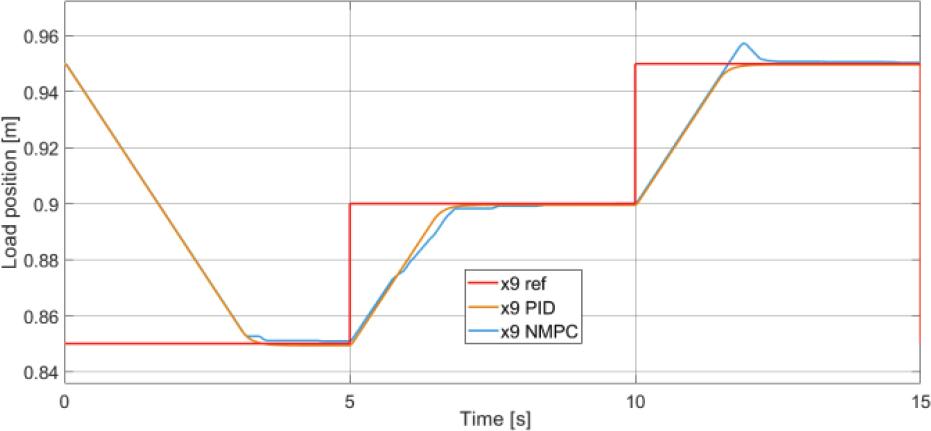
Figure 10.
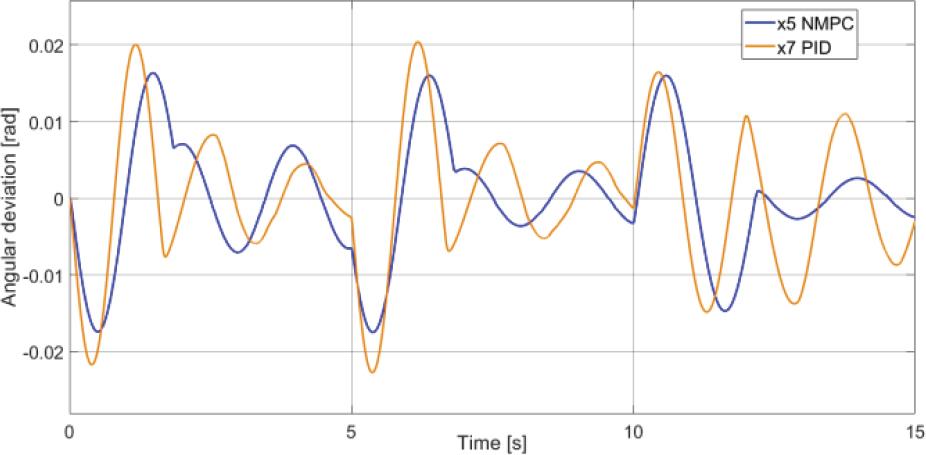
Figure 11.
State and control variables of the mathematical model
| Variable | Description |
|---|---|
| x1 | Position X axis [m] |
| x2 | Linear velocity X axis [m/s] |
| x3 | Position Y axis [m] |
| x4 | Linear velocity Y axis [m/s] |
| x5 | Angular deviation between lifting rope and Y axis [rad] |
| x6 | Angular velocity for x5 [rad/s] |
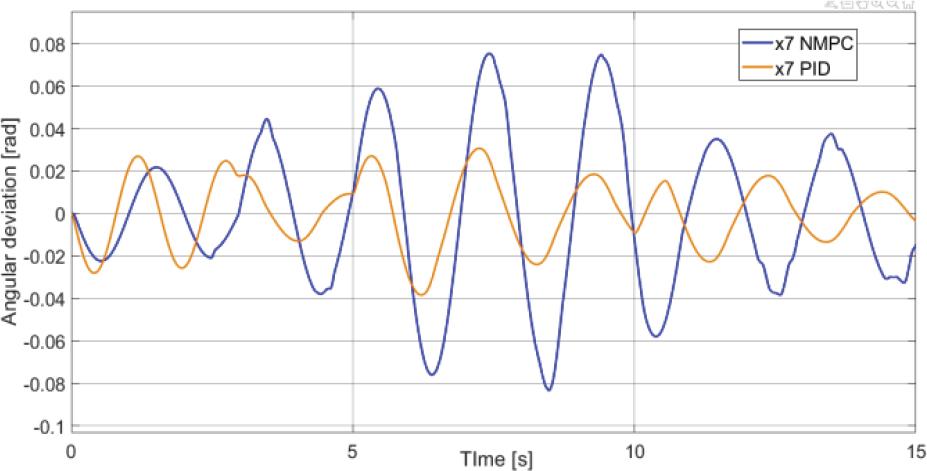
| x7 | Angular deviation between the negative direction on the Z axis and the projection of the lifting rope onto the XZ plane [rad] |
| x8 | Angular velocity for x7 [rad/s] |
| x9 | Position Z axis [m] |
| x10 | Linear velocity Z axis [m/s] |
| u1 | PWM control signal for DC motor in X axis [-] |
| u2 | PWM control signal for DC motor in Y axis [-] |
| u3 | PWM control signal for DC motor in Z axis [-] |
Proposed gains of PID controllers
| No. | PID X | PID Y | PID Z | PID A | PID B |
|---|---|---|---|---|---|
| 1 | kp = 33 | kp = 41 | kp = 50 | kp = 0 | kp = 0 |
| 2 | kp = 33 | kp = 41 | kp = 50 | kp = 10 | kp = 10 |
| 3 | kp = 33 | kp = 41 | kp = 50 | kp = 15 | kp = 17 |
ISE for NMPC controller – tuning the weight values with constant Hp
| No. | x1 | x3 | x9 | x5 | x7 | Sum |
|---|---|---|---|---|---|---|
| 1 | 0.02347 | 0.04116 | 0.02141 | 0.0008966 | 0.02083 | 0.1078 |
| 2 | 0.02349 | 0.04272 | 0.01805 | 0.001013 | 0.01973 | 0.105 |
| 3 | 0.02347 | 0.04171 | 0.01386 | 0.00092 | 0.02129 | 0.1013 |
| 4 | 0.02353 | 0.0463 | 0.01375 | 0.0008992 | 0.02578 | 0.1103 |
Constant parameters of the 3D crane model
| Parameter | Variable | Value |
|---|---|---|
| Load weight | mc | 1 kg |
| Boogie weight | mw | 1.155 kg |
| Bus weight | ms | 2.2 kg |
| Friction force axis X | Tx | 100 N |
| Friction force axis Y | Ty | 82 N |
| Friction force axis Z | Tz | 75 N |
Weight values for NMPC controller
| No. | w1 | w2 | w3 | w4 | w5 | w6 | w7 | w8 |
|---|---|---|---|---|---|---|---|---|
| 1 | 1000 | 1000 | 1000 | 0 | 0 | 0.001 | 0.001 | 0.001 |
| 2 | 1000 | 1000 | 3000 | 0.03 | 0.03 | 0.01 | 0.01 | 0.01 |
| 3 | 1000 | 1000 | 3000 | 0.03 | 0.03 | 0.0005 | 0.0005 | 0.0005 |
| 4 | 1000 | 1000 | 3000 | 1 | 1 | 0.001 | 0.001 | 0.001 |
IAE for PID controllers
| No. | x1 | x3 | x9 | x5 | x7 | Sum |
|---|---|---|---|---|---|---|
| 1 | 0.3451 | 0.345 | 0.253 | 0.1945 | 0.3759 | 1.513 |
| 2 | 0.342 | 0.3646 | 0.253 | 0.1164 | 0.248 | 1.324 |
| 3 | 0.3413 | 0.3788 | 0.253 | 0.1077 | 0.2022 | 1.283 |
IAE for NMPC controller – tuning the control horizon Hp
| Hc. | x1 | x3 | x9 | x5 | x7 | Sum |
|---|---|---|---|---|---|---|
| Hc=2 | 0.3335 | 0.3589 | 0.3007 | 0.09413 | 0.4805 | 1.568 |
| Hc=4 | 0.3243 | 0.3507 | 0.2591 | 0.08956 | 0.4705 | 1.494 |
| Hc=6 | 0.326 | 0.3552 | 0.2607 | 0.08828 | 0.4496 | 1.48 |
IAE for NMPC controller – tuning the weight values with constant Hp
| No. | x1 | x3 | x9 | x5 | x7 | Sum |
|---|---|---|---|---|---|---|
| 1 | 0.3249 | 0.35 | 0.3904 | 0.0874 | 0.4617 | 1.614 |
| 2 | 0.3742 | 0.4531 | 0.3978 | 0.1022 | 0.4505 | 1.778 |
| 3 | 0.3243 | 0.3507 | 0.2591 | 0.08956 | 0.4705 | 1.494 |
| 4 | 0.3227 | 0.5025 | 0.2551 | 0.08911 | 0.5194 | 1.689 |
ISE for NMPC controller – tuning the control horizon Hp
| Hc | x1 | x3 | x9 | x5 | x7 | Sum |
|---|---|---|---|---|---|---|
| Hc=2 | 0.02313 | 0.04175 | 0.01481 | 0.0009334 | 0.02222 | 0.1028 |
| Hc=4 | 0.02347 | 0.04171 | 0.01386 | 0.00092 | 0.02129 | 0.1013 |
| Hc=6 | 0.0236 | 0.04202 | 0.01357 | 0.0009144 | 0.01989 | 0.09999 |
ISE for PID controllers
| No. | x1 | x3 | x9 | x5 | x7 | Sum |
|---|---|---|---|---|---|---|
| 1 | 0.02403 | 0.04063 | 0.01387 | 0.003578 | 0.01483 | 0.09693 |
| 2 | 0,02398 | 0,04076 | 0,01387 | 0,00133 | 0,005404 | 0,08534 |
| 3 | 0,02402 | 0,04096 | 0,01387 | 0,001256 | 0,003864 | 0,08397 |