
The use of drones across all sectors of human activity is constantly increasing. One of the areas where the scope and innovation in drone use are most evident is in military applications. In the ongoing Russian Federation's unprovoked and unjustified war of aggression against Ukraine, drones are being used for a wide range of tasks, the most important of which include target observation and kinetic elimination. In these respects, drones pose a fundamental risk that has an enormous impact on the conduct of military operations. For example, when we take into account the neutralization of artillery fire support assets, the impact of their use is enormous [1], [2].
Moreover, the economic aspects of the use of drones are also clearly visible in the war in Ukraine, when, for example, the marginal costs of eliminating a target are incomparably lower than the use of sophisticated weapons [3].
In parallel with the growing reliance on automated systems, research efforts have also focused on improving manual artillery methods that remain essential under degraded operational conditions. Ivan et al. offer a comparative analysis of Czech and U.S. approaches to meteorological techniques in fire data preparation, proposing innovations to align manual methods with NATO standards and contemporary battlefield requirements [4], [5].
Given the importance of drones, it is also necessary to develop countermeasures to reduce their effectiveness, ensuring the impact of their use on the activities of the troops is as small as possible. One of the most widely considered tools for destroying drones is modern air defense systems, which, however, may not always be maximally effective; therefore, it is necessary to seek innovative and hybrid solutions that enable the elimination of drones in a high-quality manner [6].
The primary operational motivation for this study is the self-defense of artillery batteries and other land units in their firing positions, where small multirotor unmanned aerial vehicles (UAVs) are routinely used for observation and artillery fire-correction tasks. In such situations, massed shotgun fire performed by gun crews may represent a last-resort counter-UAV measure when dedicated short-range air defense systems are unavailable or have been saturated.
The current state of knowledge on modeling artillery effectiveness against Class I UAVs remains insufficient and must be continuously deepened, given the rapid technological development and diverse system modifications.
The use of shotguns has proven to be highly effective. One of the significant areas of current artillery research is the simplification and unification of angular and linear fire-control rules, particularly in the context of systems such as PVNPG-14M, as explored by Blaha et al. [7]. These principles directly support effective fire support operations, especially in scenarios where automated systems are unavailable or fail.
Building on these studies, our paper presents a study to estimate the probability that a drone will be hit by shotgun massed fire.
The second section defines the characteristics of shotguns and their ammunition. Next, the theoretical foundations for modeling important aspects of shooting are presented. The third section describes the design of a Monte Carlo experiment aimed at constructing a probability model of successful UAV destruction.
Our findings validate expected shooting results and shed light on the efficiency of the proposed anti-drone fire system. The primary advantage of the introduced simulation approach lies in its ability to estimate the probability of successfully shooting down a drone, providing parameters of artillery resources.
This section presents the pillars for preparing a simulation study and collects the most important findings about shooting accuracy. This approach allows us to estimate the probability density function using a simulation study in the last section.
Our paper presents mathematical models to describe the effectiveness of a massed fire on this target. The optimal firing parameters of a shotgun, taking into account realistic weapon parameters, are discussed. The problem of modeling the dispersion of shot fired from a shotgun is very extensive, underdeveloped, and depends on many factors. Shotgun pellets dispersion can be influenced in several ways. For details, see [8], [9].
The last subsection presents a realistic scenario of an UAV attack, specifying its parameters and those of the massed fire against it. The simulation study assumes massed shotgun fire (multiple shooters) against the UAV. The ammunition parameters and the usual accuracy of fire are presented in the following subsections.
The fundamental element that affects dispersion in any barreled weapon is the shape of the inner surface of the barrel. The vast majority of shotguns are equipped with a smooth-bore barrel (without rifling). In addition, hunting and sporting shotguns are usually equipped with a system of inter-changeable chokes. In principle, the chokes narrow (modify) the muzzle of the shotgun and thus affect the shape of the shot group.
A schematic of different choke types can be seen in Fig. 1. Military and police weapons, on the other hand, usually have so-called cylindrical chokes because they are expected to be used with a wide variety of cartridges. It is also possible to find shotguns equipped with a rifled barrel, usually military and police weapons, where the assumption is to use a single projectile (a rubber projectile for non-lethal use or a slug for breaking door locks) primarily.
Example of choke design [8].
Another crucial parameter influencing the size of the dispersion spread of the shot charge is its design. Two types of design are encountered. The differences are shown in Fig. 2. Variant a) uses a basket to dislodge the projectiles, while variant b) uses only a felt (or similar) wad. It is not possible to quantify the effect of shotshell construction on pellet-pattern dispersion without empirical data, as it depends on wad/shotcup design, pellet hardness, and other cartridge features. Accordingly, many armed forces assess construction variants through live-fire testing. This study does not simulate alternative construction options; instead, we adopt a fixed baseline cartridge as specified in Table 1 (12/76 #4 Buckshot, in service with the Czech Army).
Different construction of a shotgun cartridge [9].
Cartridge parameters.
| Type | Number of pellets | Pellet diameter [mm] | Weight of one pellet [g] | Initial velocity [m/s] |
|---|---|---|---|---|
| #4 Buckshot | 41 | 6.09 | 1.32 | 370 |
Depending on the caliber and type of cartridge, the projectile can contain from a few larger pellets to several hundred small pellets. The most common shotgun caliber for most applications is 12 gauge, which is equivalent to a barrel diameter of 18.6 mm. However, there are other common calibers. These include the 16- and 20-gauge shotguns, and the .410 in particular. Increasing the number of pellets in each cartridge appears to be the easiest way to increase the probability of hitting the target.
This can be achieved by reducing the pellet diameter (and thus its weight) while maintaining the pellet's overall weight, thereby reducing the effect on the target. Alternatively, a higher number of pellets of the same size can be achieved by lengthening the cartridge case. This trend can be observed on the already mentioned 12 gauge. The original cartridge was classified as 12/65 (caliber / case length in mm); this was gradually modified to 12/70, 12/76, and finally to the current “ultramagnum” version 12/89. However, this solution encountered practical limits, where the powder charge and maximum barrel pressure necessarily increased with increasing shot weight. This significantly increased the recoil transmitted to the shooter.
For the simulations reported in this publication, the #4 Buckshot cartridge (in American terminology), also known as 12/76/6.09 mm SB (metric designation), was used as a baseline. The cartridge parameters are shown in Table 1. This cartridge was chosen due to its availability for experiments, its use in the Czech Army, and, based on previous publications, the ability of single pellets to destroy UAVs at distances up to 50 m [10].
The error system of shooting consists not only of the scatter of the weapon itself (here, the scatter of the weapon is considered to be the scatter pattern of the cluster of pellets), but also of the error of aiming the weapon at the target. The actual error system is much more complicated and is described in the literature [11]. The object of this paper is to analyze the relationship between the weapon-target pointing error and the scatter pattern in order to find the optimal ratio to maximize the probability of target destruction. The relationship between shooting accuracy and precision is demonstrated in Fig. 3.
Accuracy and precision of fire.
Fig. 3 describes four variants, where the following errors occur:
Small aiming error with small dispersion.
Big aiming error with small dispersion.
Small aiming error with big dispersion.
Big aiming error with big dispersion.
As shown in Fig. 3(d), a more dispersed pattern can be advantageous when shooting is conducted with an aiming error. In degraded or denied technological conditions, such as during failures of automated fire control systems, artillery units must rely on manual correction methods to ensure sufficient firing accuracy. A recent study by Šustr et al. [12] has demonstrated that such manual approaches, when properly calculated, can achieve precision comparable to that of automated systems, particularly in polar-coordinate-based missions. In practice, aiming error is unavoidable. It can usually be summarized by the following relation.
Each item represents the error introduced by the shooter, the sight, or the atmosphere (or other). For the purposes of this paper, only the total error σs is used.
Active localization systems based on time-of-arrival (TOA) or time-difference-of-arrival (TDOA) measurements – for example, distributed RF receivers tracking the UAV's control or telemetry links, or acoustic arrays detecting rotor noise – can detect and track small multirotor drones at ranges of several hundred meters, with position errors on the order of centimeters to decimeters under favorable conditions [6], [13]. Such systems provide early warning and target coordinates that can be passed to air-defense assets or local defenders. In the context of artillery units, they may be integrated with fire-support networks to cue manual counter-UAV measures. For the purposes of this study, however, we assume that an external sensor network of this type is available to cue the shooters, but that no dedicated short-range air-defense system is present at the position. Therefore, massed shotgun fire represents the only feasible last-resort engagement option in the scenario considered. The drone's parameters are given in Table 2.
Drone parameters.
| Type | Size [m2] | Distance [m] | Azimuth angle [deg] | Elevation angle [deg] |
|---|---|---|---|---|
| Class I | 0.25 | 25, 35, 50 | 90 | Constant |
| UAV-micro | φ = arcsin(d) |
In this work, we restrict attention to Class I “micro” UAVs, which are currently the most common type observed above front-line artillery positions.
Their low mass and relatively fragile airframe make them vulnerable to single #4 Buckshot pellets at ranges up to approximately 50 m, as shown in previous experimental work [10], [18]. For larger and heavier UAV classes, the required terminal pellet energy, structural resistance, and typical engagement distances differ substantially, and the present shotgun-based model would need to be re-parameterized (target geometry, material failure thresholds, and engagement range). Consequently, the results presented here should not be directly extrapolated beyond Class I UAVs; instead, they provide a proof-of-concept and baseline methodology for this most frequently encountered category.
Consider a small drone (Class I – micro) moving in uniform rectilinear motion at a constant velocity (r). The drone maintains a constant altitude and moves along a trajectory defined by a constant path parameter (p), which represents the shortest perpendicular distance between the flight path and the shooter's position. For simplicity, the direction of the drone's motion is parallel to the x-axis of the coordinate system used, with its origin coinciding with the shooter's position. This axis is also considered as the drone's distance (dd). The horizontal distance (dv) and the spatial distance (dpr) can be determined using the Pythagorean theorem.
Note: In this simulation, a constant flight altitude is assumed to eliminate the influence of elevation on shooting accuracy.
Model situation.
The dynamic behavior of small UAVs, especially under environmental influences such as turbulence or evasive motion, introduces complex linear-angular coupling effects. Recent work by Tang et al. [14] in Measurement Science Review provides insight into such coupled vibration characteristics and parameter identification, which may inform more advanced models of UAV motion and engagement prediction [14].
The drone's actual distance is necessary to determine the firing parameters correctly.
For the purpose of this simulation, the following values are used. The lead error is characterized by standard deviations and is calculated as follows:
k is a multiplication factor (discrete values of 0.2, 0.4, 0.6, and 0.8 used);
n is the size of the calculated lead (in meters).
The application of the lead error and complex error is shown in Fig. 5 and Fig. 6. The midpoint of the impact (Pi) is located on the line represented by the directional vector of the drone flight at a distance determined by the pellet's flight time and the drone's speed. Without the lead error, the midpoint of the hit would be located at point Pi. When the lead error is taken into account, the real point of impact is located according to a normal distribution on a straight line (yellow) around point Pi.

Application of lead error.
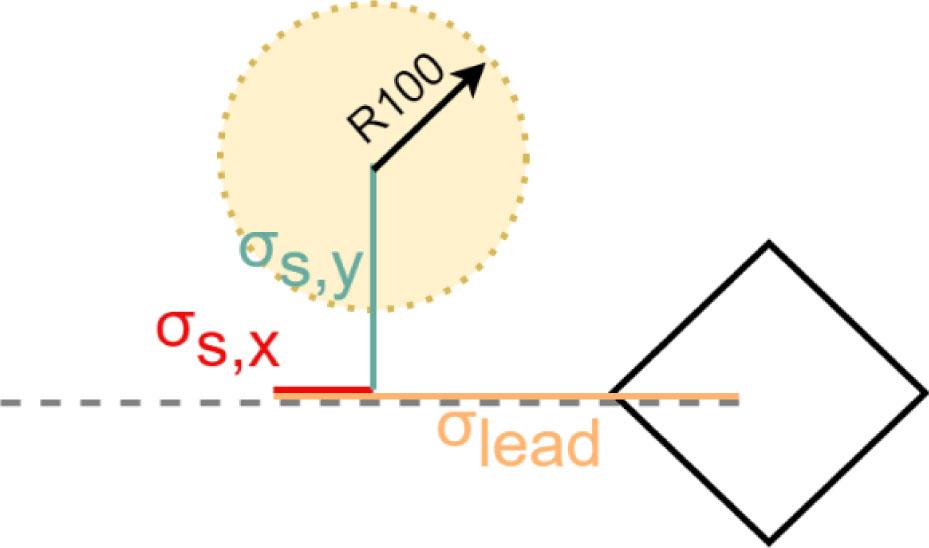
Application of examined complex errors.
In addition, three discrete values of the aiming error were included in the calculation. We considered
The aiming error was considered circular for the purpose of this paper. Thus, σx = σsi and σy = σsi.
As a rough benchmark of small-arms marksmanship, Corriveau et al. [11] report an aiming error of approximately σ = 0.12 m at 100 m for trained shooters firing an assault rifle from the standing position. Since shotguns are employed at much shorter ranges and with different weapon ergonomics, the true aiming errors in the considered anti-UAV scenario may differ; therefore, in this initial study, we explore a broader range of σ values and plan to determine realistic shotgun aiming errors experimentally in future work. The actual aiming-error parameters for shotgun shooters will then be verified experimentally in subsequent research.
Based on the parameters described above, a Monte Carlo simulation was performed in Matlab.
Monte Carlo methods are widely accepted for modeling measurement uncertainty in engineering applications. Utomo et al. provide a comparative analysis of GUM and Monte Carlo approaches, which supports the methodological foundation of this simulation framework [15].
A 3D model of a DJI Mavic 2 drone was used as the target. Using known values of position and side angle, a projection of the drone onto the target plane was created. It was aimed at the center of the target. Subsequently, the lead determination error and the aiming error were applied. A random number generator was used to create a shot field in the target plane based on the given scattering parameters. If the drone's body was hit, it was considered destroyed.
To ensure simulation accuracy and repeatability, structural calibration and alignment methods similar to those used in torque sensor systems may be adapted. Kučera et al. developed a carbon-based metrological arm for torque calibration that offers valuable parallels in managing measurement uncertainties and physical test integrity [16].
Similar to threat assessment models in air defense, fuzzy-based expert systems have also been developed for evaluating real-time aerial threats using probabilistic reasoning. A system proposed by Cimr et al. demonstrates how fuzzy logic can be applied to evaluate aircraft threat levels to protected assets, offering potential inspiration for real-time targeting assessments [17].
If the rotor area was hit, another random-number generator was used to evaluate the conditional probability of hitting the rotor itself as described in previous publications. To illustrate, this is approximately 20 %. A single rotor hit is also considered to destroy the drone [18].
A virtual experiment was performed for each combination of firing parameters. The parameters (in agreement with Fig. 4) of the drone flight and its speed were chosen as follows:
Therefore:
The constant parameters of the used cartridge (number of pellets and initial velocity of pellet) were:
The projectile flight time to the target was calculated using the previous publication [18] for the distance considered:
For the purpose of the simulation, the scatter of a single shotgun shot was assumed to be uniform (in both axes). The scattering of a shot beam is characterized (similarly to the scattering of pellet weapons) by the angular unit disp [mrad]. Based on the known distance of the target, the diameter of the circle containing all hits is calculated. The quantity is denoted 2R100 and is calculated as follows:
The two-zone law of target destruction was used. The first zone is represented by the entire projection of the drone body and is eliminated in a single hit. The second zone is considered to be the rotor compartments, where the conditional probability of destruction described in previous publications is applied upon being hit [18].
Related research on the deformation effects of explosive charges on structural elements provides additional background for assessing the probability of damage from kinetic or blast-based drone neutralization. Palasiewicz et al. demonstrated how simulations and live explosive testing can be used to evaluate penetration and damage potential across various charge configurations, offering analogies for similar modeling approaches in UAV-target interactions [19].
The different qualitative shape of the curve in Fig. 10, compared with Fig. 8, Fig. 9, and Fig. 11, is caused by the shorter engagement distance dp = 25 m. At this range, the pellet cloud is still relatively compact; thus, increasing dispersion initially spreads pellets over the entire projected drone area without yet reducing the pellet density below the threshold required for destruction. As dispersion continues to grow, pellet density over the target declines, and the destruction probability decreases. This interplay between pellet-cloud diameter and target projection area results in a flatter maximum and a different curvature of the probability curve at dp = 25 m.
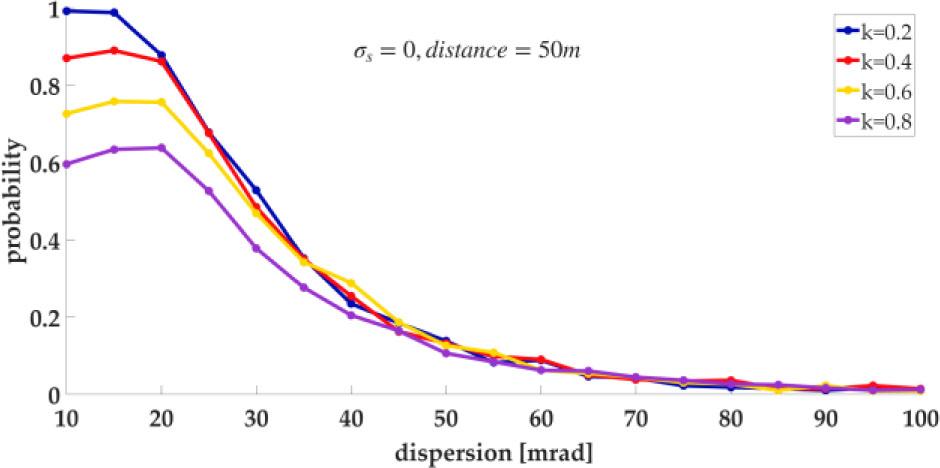
For each set of parameters, 1000 simulations were performed, and their results were averaged. The simulation results are depicted in Fig. 7–Fig. 11. For each value of the aiming error, a separate simulation was performed. In accordance with Table 1, the target was shot with a cluster of 41 pellets. The different lead errors (determined by the multiplication constant k) are color-coded in each simulation. The distance dp = 50 m was chosen based on the results of previous experiments. If firing is conducted at a shorter distance, a higher probability of destruction is achieved. This phenomenon is caused by the target's larger relative area at the firing distance and by the projectile's shorter flight time to the target.
Probability of destruction with σ = 0, dp = 35 m.
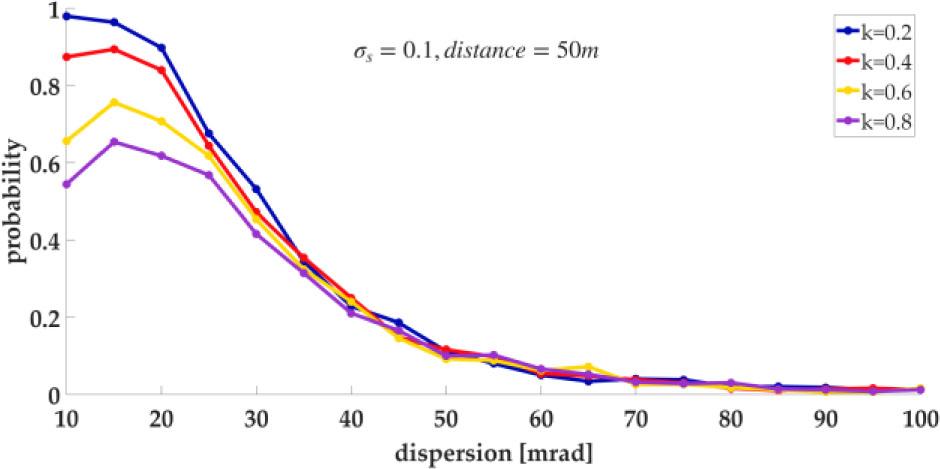
Probability of destruction with σ = 0.1, dp = 50 m.
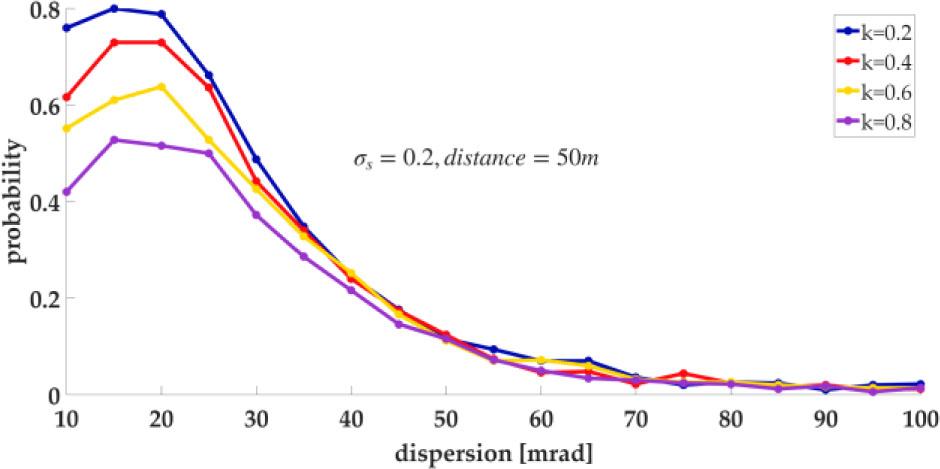
Probability of destruction with σ = 0.2, dp = 50 m.
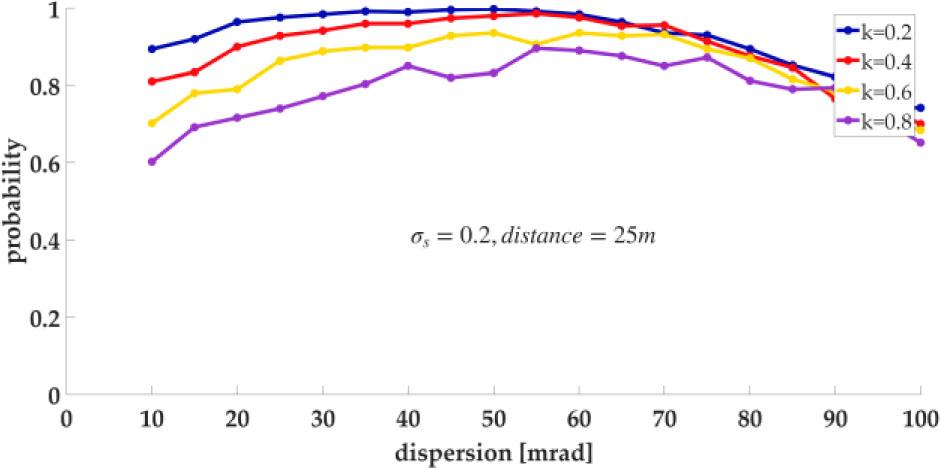
Probability of destruction with σ = 0.2, dp = 25 m.
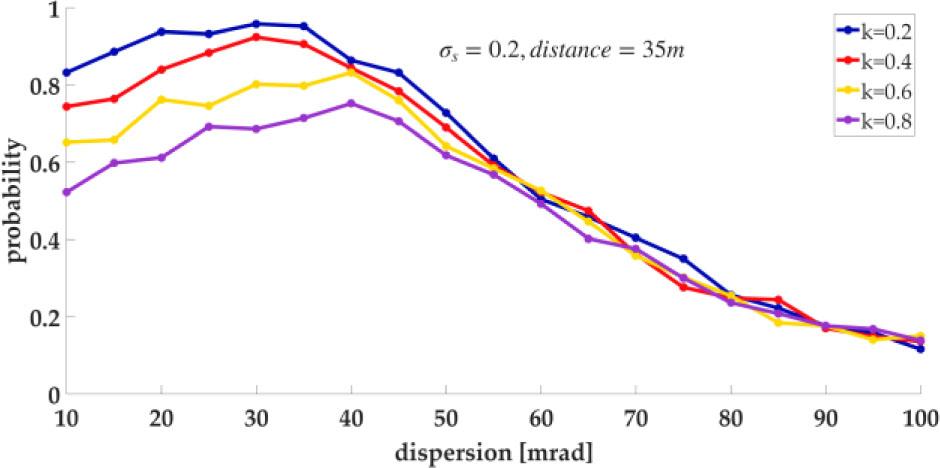
Probability of destruction with σ = 0.2, dp = 35 m.
The time of flight of the projectile to the target is determined by the laws of external ballistics and cannot be easily linearized. However, it results in a shorter lead and thus a smaller considered lead error.
To verify this theory, a simulation for σs2 = 0.2 was also performed at a distance of dp = 25 m and dp = 35 m with flight time t = 0.08 s and t = 0.105 s, respectively.
Further, the probability estimates determined by dispersion and projectile flight time (distance) with lead error given by a constant k = 0.2 are shown in Fig. 12, and Fig. 13.
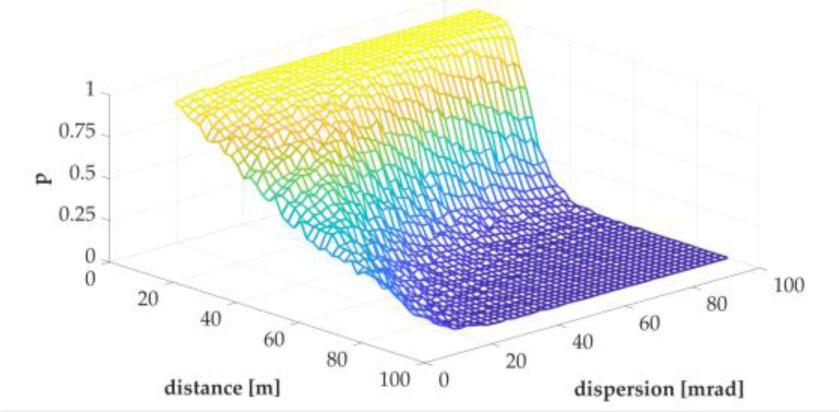
3D-graphical visualization of destruction probability estimate determined by dispersion and projectile flight time (distance) with error k = 0.2.
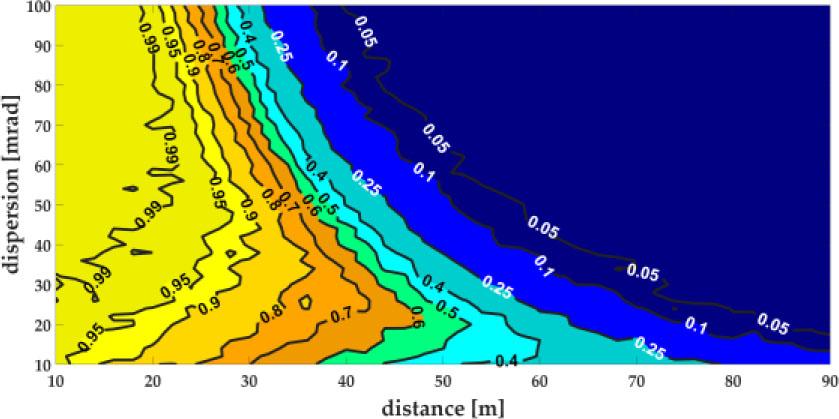
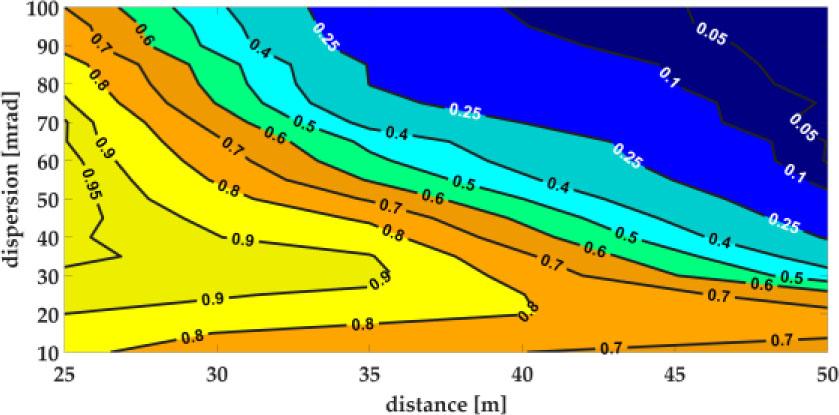
Isolines with estimated probability of destruction determined by dispersion and projectile flight time (distance) with error k = 0.2.
From the simulation results shown in Fig. 13–Fig. 16, it can be observed that the maximum hit probability of approximately 70–80 % was achieved for a dispersion of 20–50 mrad at a distance of 30–40 m. The influence of the lead error, represented by the coefficient k, on the hit probability is most clearly illustrated in Fig. 7–Fig. 11. For σ = 0.2, increasing the value of the lead-error coefficient from k = 0.2 to k = 0.8 resulted in a decrease in the hit probability of approximately 40 % at a target distance of 10 m, while the decrease was approximately 10 % at target distances of 35–50 m.
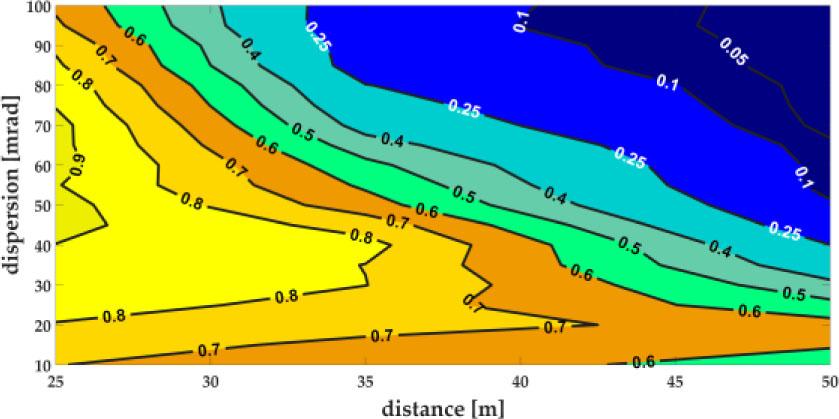
Isolines with estimated probability of destruction determined by dispersion and projectile flight time (distance) with error k = 0.4.
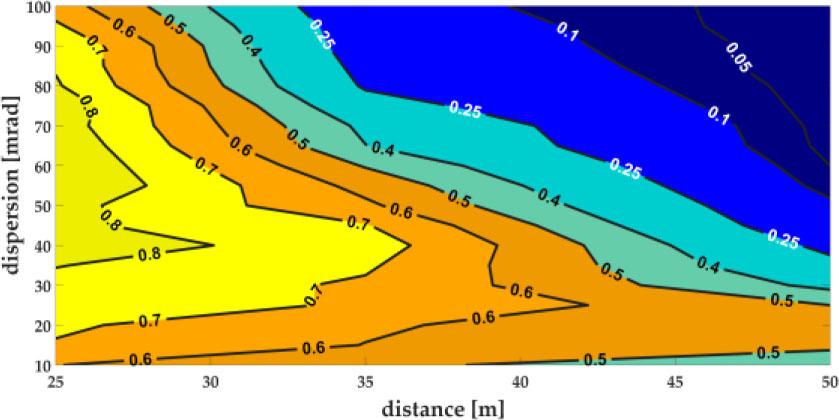
Isolines with estimated probability of destruction determined by dispersion and projectile flight time (distance) with error k = 0.6.
Isolines with estimated probability of destruction determined by dispersion and projectile flight time (distance) with error k = 0.8.
Several conclusions can be drawn from the simulation results as follows:
The probability of hitting and destroying the target at distances greater than 35 m decreases significantly when the dispersion exceeds 30 mrad.
The maximum probability of target destruction shifts to higher values of dispersion as σ increases. Of course, the absolute values of PZ decrease with increasing σ.
The use of a shotgun with a dispersion of ~ 20 mrad seems to be optimal for shooting the target under consideration.
Weapons currently used by the Czech armed forces (Benelli M3T), with the tested ammunition (12/76/6.09 mm SB), achieve a theoretical dispersion of 45 mrad. They are therefore unsuitable for anti-drone defense. When at the limiting distance of 50 m, the probability of a successful attack on a UAV is around 10 %, regardless of other firing parameters. The results of this experiment are overestimated because there are other sources of error in shotgun firing that are not included in this article. Therefore, the real probability values are slightly lower, but the trend shown in the graphs is maintained.
In addition, some approaches to target allocation and prioritization under uncertain conditions may benefit from methods based on fuzzy logic. Previous work by Májek and Šlouf [20] explored the use of fuzzy sets for dividing and managing target engagement tasks, offering inspiration for future modeling of decision processes in low-certainty engagements such as drone neutralization [17], [21], [22].
The primary goal of this case study was to develop a risk evaluation methodology. The advocated Monte Carlo and statistical methodology offers a useful diagnostic instrument for an anti-drone system risk investigation. A major limitation of this approach lies in the correct setting of input parameters. The presented simulation prognostics study may be applied to various fields with similar problems.
The findings of this work could be used in upcoming experimental verifications and subsequently as a recommendation for the acquisition of new armament designed for drone protection. In particular, the use of weapons equipped with a system of interchangeable chokes, allowing the shape of the shot cluster to be modified, appears to be advantageous. Moreover, the results highlight the broader potential of artillery assets to be adapted for non-standard operational purposes, beyond traditional battlefield engagements. Similar innovative applications of artillery systems have recently been studied in the context of wildfire suppression, demonstrating the flexibility of these weapon platforms for crisis management scenarios [23].
Finally, a critical gap to be addressed within this project concerns the environmental footprint of artillery-based C-UAS measures. Environmental impacts are now an integral dimension of defense research and must be assessed alongside operational effectiveness [24].
The results should be incorporated into artillery officer curricula and courses so that unit commanders are familiar with current trends and interoperability requirements for Joint fires [25].
The findings should also feed into broader effectiveness-assessment activities of artillery units during combat operations, including constructive-simulation studies of self-defense and area protection at firing positions [26].