
Figure 1.
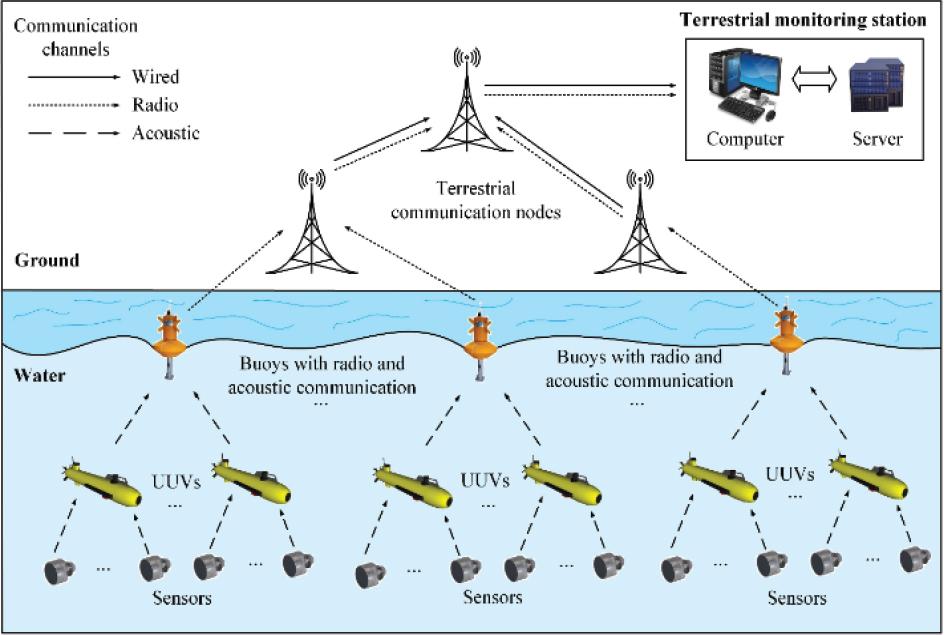
Figure 2.
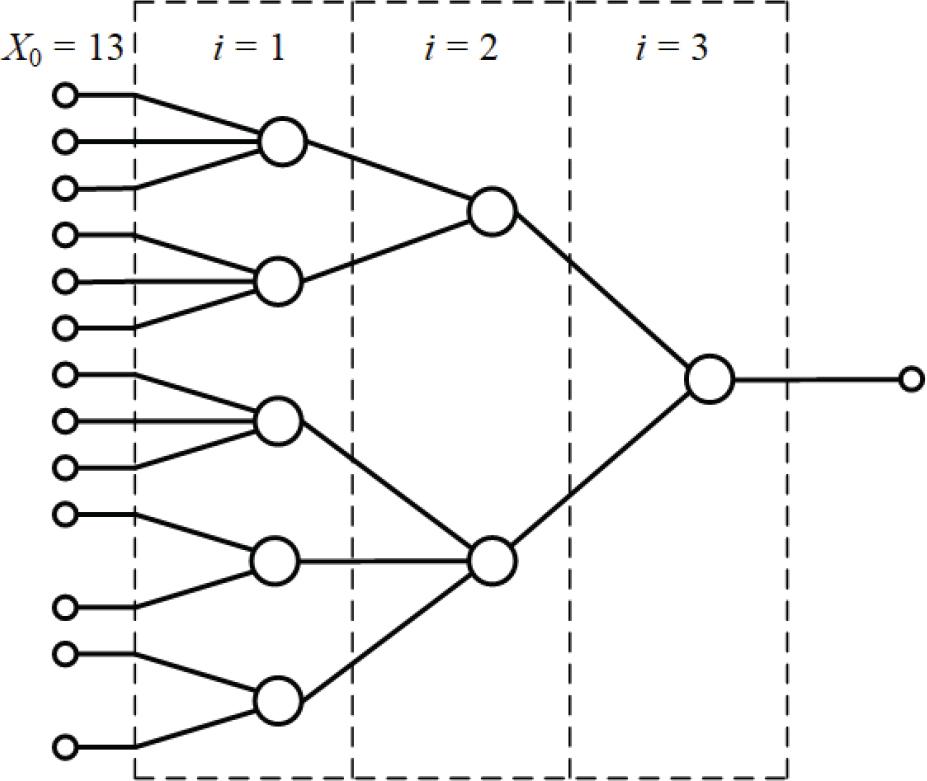
Figure 3.
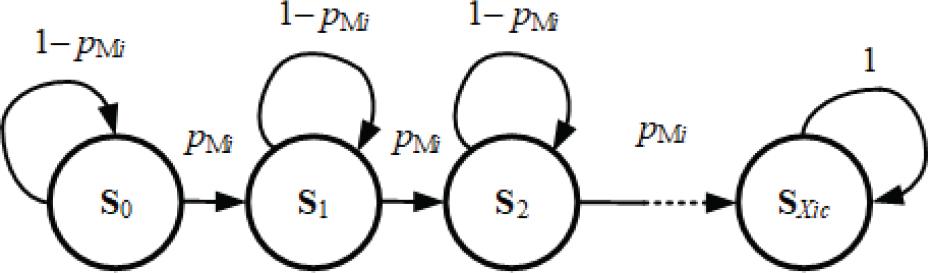
Figure 4.
Figure 5.
Figure 6.
Main parameters of the USN’s structure at the 1st iteration
| i | Type of hierarchy level | pmi | Xi | Xic | Ni max |
|---|---|---|---|---|---|
| 0 | Initial sensors | 0.025 | 16 | 8 | 781 |
| 1 | UUVs | 0.0125 | 8 | 4 | 1045 |
| 2 | Buoys | 0.01 | 4 | 2 | 924 |
| 3 | Terrestrial communication nodes | 0.001 | 2 | 1 | 6955 |
| 4 | Main terrestrial communication node | 0.0005 | 1 | 1 | 13914 |
Changing of the vector X during the implementation of the method
| Number of iteration | Vector X | NΣmaxR |
|---|---|---|
| 1 | {16,8,4,2,1} | 439 |
| 2 | {32,8,4,2,1} | 535 |
| 3 | {32,8,8,2,1} | 635 |
| 4 | {32, 16, 8, 2, 1} | 761 |
Main parameters of the USN’s structure at the 4th iteration
| i | Type of hierarchy level | pmi | Xi | Xic | Ni max |
|---|---|---|---|---|---|
| 0 | Initial sensors | 0.025 | 32 | 16 | 1245 |
| 1 | UUVs | 0.0125 | 16 | 8 | 1569 |
| 2 | Buoys | 0.01 | 8 | 4 | 1307 |
| 3 | Terrestrial communication nodes | 0.001 | 2 | 1 | 6955 |
| 4 | Main terrestrial communication node | 0.0005 | 1 | 1 | 13914 |
Main parameters of the initial USN’s structure
| i | Type of hierarchy level | pMi | Xi | Xic |
|---|---|---|---|---|
| 0 | Initial sensors | 0.025 | 16 | 8 |
| 1 | UUVs | 0.0125 | 8 | 4 |
| 2 | Buoys | 0.01 | 4 | 2 |
| 3 | Terrestrial communication nodes | 0.001 | 2 | 1 |
| 4 | Main terrestrial communication node | 0.0005 | 1 | 1 |
Main parameters of the USN’s structure at the 2nd iteration
| i | Type of hierarchy level | pmi | Xi | Xic | Ni max |
|---|---|---|---|---|---|
| 0 | Initial sensors | 0.025 | 32 | 16 | 1245 |
| 1 | UUVs | 0.0125 | 8 | 4 | 1045 |
| 2 | Buoys | 0.01 | 4 | 2 | 924 |
| 3 | Terrestrial communication nodes | 0.001 | 2 | 1 | 6955 |
| 4 | Main terrestrial communication node | 0.0005 | 1 | 1 | 13914 |
Main parameters of the USN’s structure at the 3rd iteration
| i | Type of hierarchy level | pmi | Xi | Xic | Ni max |
|---|---|---|---|---|---|
| 0 | Initial sensors | 0.025 | 32 | 16 | 1245 |
| 1 | UUVs | 0.0125 | 8 | 4 | 1045 |
| 2 | Buoys | 0.01 | 8 | 4 | 1307 |
| 3 | Terrestrial communication nodes | 0.001 | 2 | 1 | 6955 |
| 4 | Main terrestrial communication node | 0.0005 | 1 | 1 | 13914 |