

Vibration-Based Methods (VBMs) for Structural Health Monitoring (SHM) of bridges have been extensively developed over the past 30 years, Rytter (1993); Sohn et al. (2003); Alvandi & Cremona (2006); An et al. (2019); Karakostas et al. (2023). These methods are promising as they potentially allow for the identification of damage resulting from structural changes over time, such as stiffness or mass variations due to various causes: degradation of material and elements properties or alterations in the connections between structural elements. Nevertheless, the field implementation of VBMs remains challenging for several reasons: measurements are subject to uncertainties and noise, the number of sensors is limited, and the ambient excitation (e.g., traffic) is variable and unknown, Ewins (2000). It is therefore crucial to evaluate their performance under real conditions, Erduran et al. (2021) and to assess their ability to remain in safe service, Vičan et al. (2016).
The first two key objectives of SHM are damage detection and localization. A conventional approach to achieve this involves a two-step procedure: first, the identification of the structure’s natural frequencies and mode shapes in both healthy and damaged states, Kortiš et al. (2017); second, damage detection and localization based on modal data. For the latter step, a classical path consists in updating a numerical model of the structure, Ereiz et al. (2022). A common strategy for this purpose is the use of perturbation methods, where a sensitivity matrix links variations in modal properties to changes in the model parameters, enabling the updating of the stiffness and mass matrix. This update is carried out twice: first using the modal data corresponding to the initial state S1 to calibrate the initial numerical model, then using the modal data corresponding to the damaged state S2 to assess the modifications that occurred in the structure between the two states. The variation of the model parameters between these two states allows tracking of the structural evolution, Parloo et al. (2003), Sanda et al. (2017). The Dallet steel bridge (France, Puy-de-Dôme) underwent major renovation work in 2023–2024, during which the masonry deck of the structure was demolished. This paper presents a modal identification procedure along with the updating of a simplified numerical model of the bridge for two structural states: first, the initial state S1, and second, the state S2 corresponding to the partial demolition of the deck. A detailed numerical model of the structure is also used to compare and validate the simplified finite element model employed for the updating process.
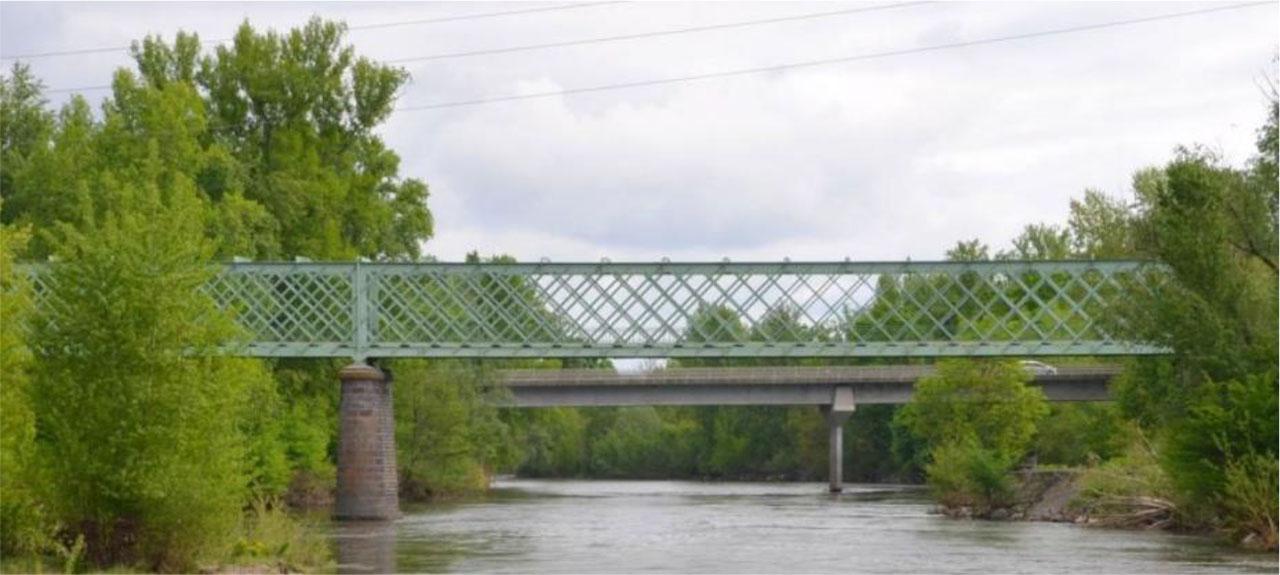
The Dallet Bridge is a steel bridge built in 1899, located approximately 10 km east of Clermont-Ferrand, France (Figure 1). It crosses the Allier River and consists of three spans measuring 47.25 m, 58.60 m, and 58.60 m, respectively. The total length of the bridge is 154 m, with an overall height of 4.6 m and a width of 4.4 m. The structure is supported by four bearing pairs: two abutments at the ends (named A0 and A3) and two intermediate piers (named P1 and P2). The bearings at A0, P1, and A3 are roller supports, while those at P2 are pinned supports (Figure 2 and Figure 10).

Elevation view of the structure from upstream
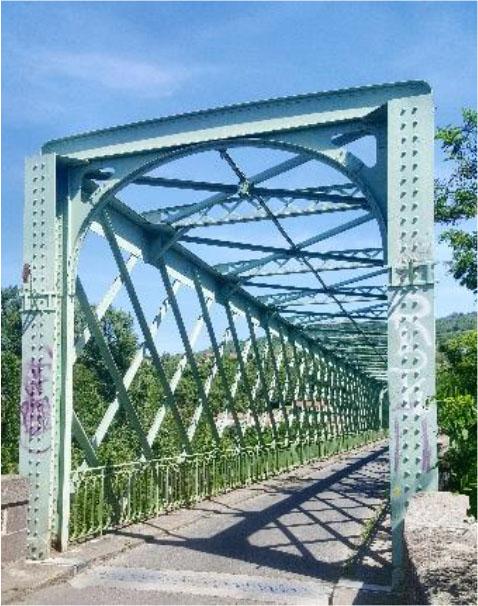
View of the second span of the bridge (P1–P2) from upstream
The truss section is made of flat bars and angle sections assembled by rivets. The angle profiles are paired to form the diagonal bracing of the vertical panels that represent the vertical main truss-beams of the bridge (Figure 2 and Figure 3). The angle section sizes used for this bracing vary within a single span, suggesting a slight variation in stiffness (variation not considered in the detailed modelling). These elements, located above the deck, exhibited only limited corrosion.
View from A0
The deck consists of brick vaults in abutment against the transverse steel beams. Each end span of the bridge includes 28 identical transverse steel beams, while the central span includes 34. The transverse steel beams are composed of riveted plates and angles. The vaults are overlaid with concrete, a sand layer, a second concrete layer, and an asphalt wearing course. (Figure 4 and Figure 5). Sidewalks are also present on both sides of the carriageway. The bridge deck reached some degradations mainly near the supports which required its demolition in order to extend the life of the bridge and adapt its use to cars, bicycles and pedestrians. The main damage observed was due to corrosion affecting most of the riveted transverse steel beams, with highly variable degrees of severity. In order to characterize the material, specimens were extracted from the flange angles and web plates of the replaced beams. The tests indicated a plastic behaviour with a yield plateau, with yield strength values ranging from 215 to 246 MPa.
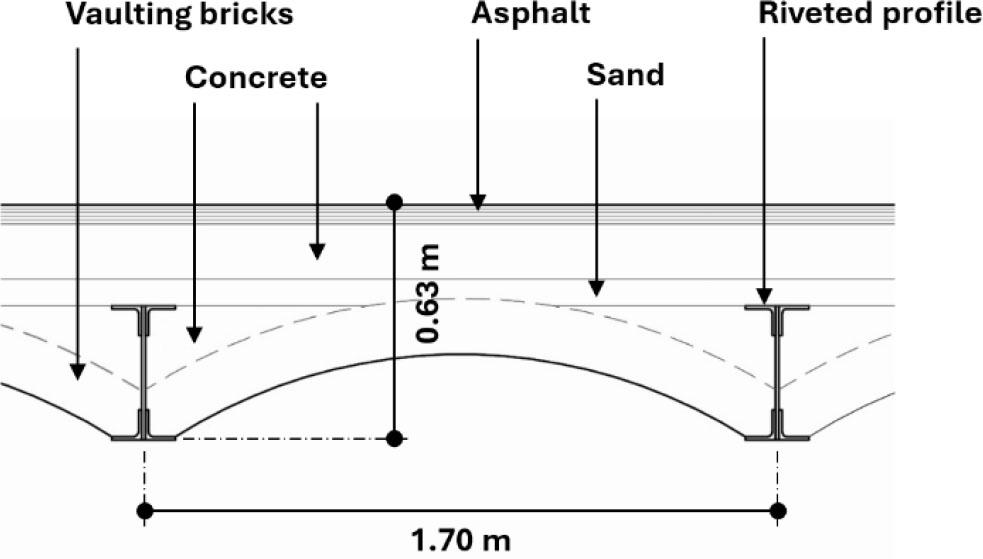
View of the bridge deck cross-section

Bottom view of the existing bridge deck
The deck demolition was carried out from the left bank toward the right bank. The operation was performed using a mechanical excavator assisted by a dumper that moved along the bridge to transport the debris (Figure 6). It is important to note that this dumper, used for transporting the debris, was the only source of mobile excitation present on the structure during the demolition works. The degraded state S2 corresponds to the complete removal of the masonry vaults over the first 15 transverse steel beams adjacent to the left bank. All data acquisitions related to this state S2 were conducted over a single day. The remaining steel elements at this stage are shown in Figure 7. Similarly, the measurements corresponding to the initial state S1 were performed over a single day, during which the dumper moved across the structure to transport the previously demolished asphalt wearing course. Accordingly, the deck mass considered in this initial state includes all masonry components of the deck, except the asphalt layer.

View of the dumper before demolition

View after deck demolition
The structure was instrumented with 22 wired accelerometers installed with a constant spacing along each span: 6.5 m for central span and 6.7 m for both end spans. The state S2 corresponds to the removal of 15 vaults, representing approximately 25 linear meters. This corresponds to a removal of the masonry vaults up to sensor 4. The area affected by the demolition is shown in Figure 8.

Plan view showing the location of the 22 accelerometers and the demolition area
The accelerometers were installed on the downstream side of the bridge, directly on the deck, along the web of the lower longitudinal girders of the bridge steel truss beam (Figure 9 and Figure 10). They allowed for triaxial acquisition. The modal analysis is limited to the displacement component along the z-axis aligned with gravity, which allows for the identification of vertical bending modes only (rotations about the y-y axis). A gateway located near abutment A0 collected and transferred the data to a server for analysis.
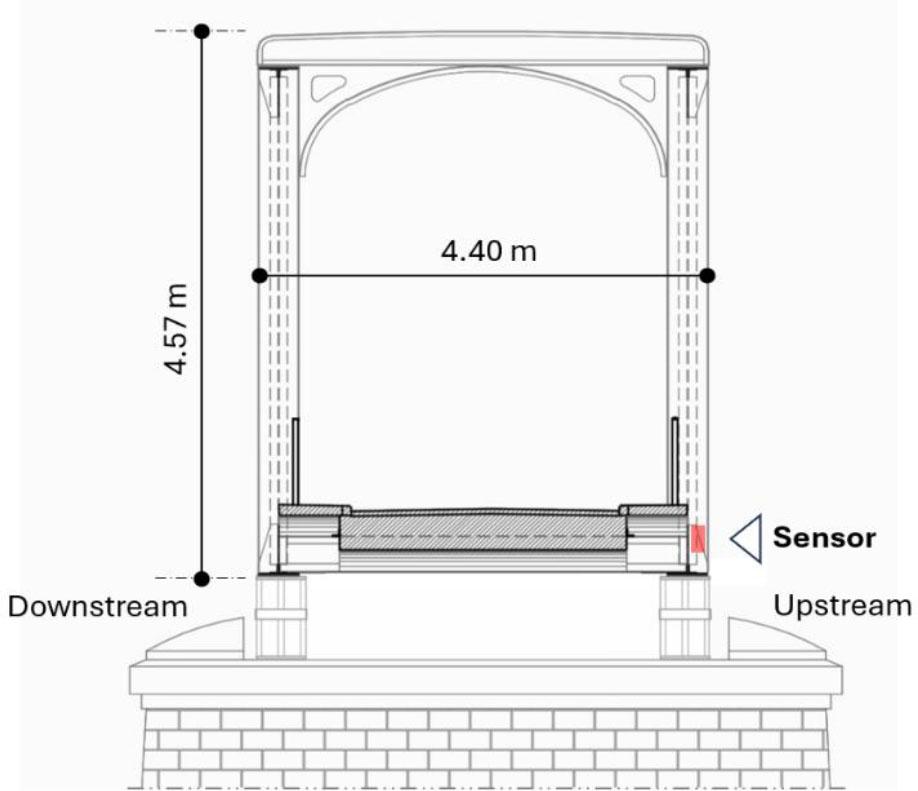
Cross-section view of the structure

Sensor reference and hinge support (on Pier P2)
The sensors installed on the structure were developed by Cideco and include an Analog Devices ADXL355 accelerometer (Figure 11). The accelerometers are connected to a wired acquisition board including a Multicomp HC-49/U quartz crystal, a microcontroller, and an RS485 communication module. Each sensor also includes a Memsic MMC5983MA magnetometer and a Sensirion STS35 precision temperature sensor. All recorded data are sent to a server via a mini-PC connected to a battery, which is continuously charged by a solar panel. During the measurement campaigns, the selected range was ±2g with a 20 − bit resolution. Given the attenuation of the bandwidth caused by the internal anti-aliasing filter, the measurement range, and the sampling frequency of 250 Hz, the theoretical acceleration noise has a standard deviation of

View of the accelerometer developed by Cideco
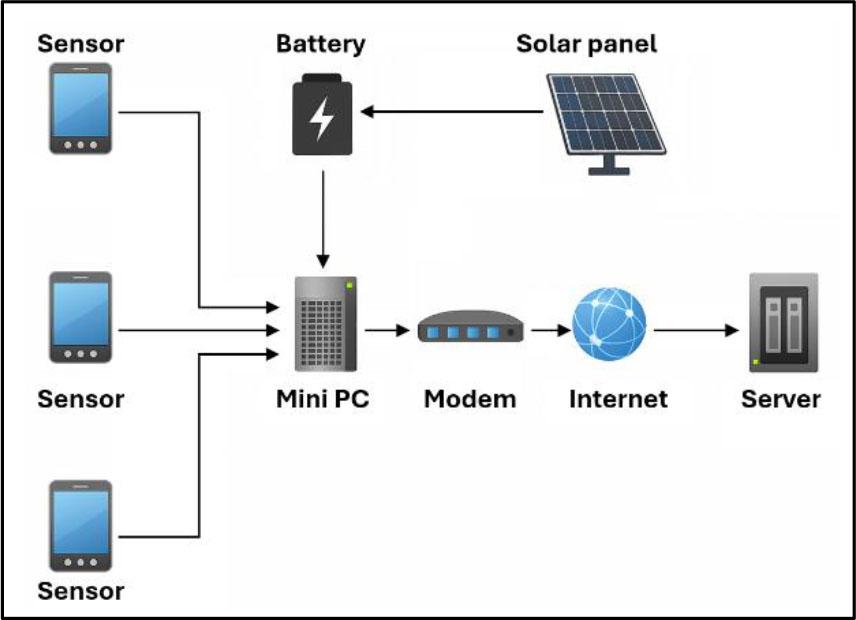
Flowchart of the acquisition system
The simplified model of the bridge is made of a steel beam, supported by four elastic supports, with a total length of 153.9 metres. The numerical model consists of 92 Euler–Bernoulli beam elements (Figure 13). The 22 nodes corresponding to the sensor positions are placed following the same layout as the actual sensors on the structure, with four finite elements between each pair of sensor nodes. They are called Ac1 to Ac22 on the Figure 13. The vertical moment of inertia Iy is taken as 0.625 m4, corresponding to the inertia of a truss section made of the four longitudinal steel profiles (top and bottom steel girders). Since axial forces have no influence on the bending modes under these conditions, a unit cross-sectional area of 1 m2 is assumed. The associated mass density of 6983 kg/m3 accounts for both the steel structure and the deck mass.

Simplified finite element model diagram
Considering the obtained finite element model, the dynamic time response is governed by the second-order differential equation:
In the case of the OMA to be carried out (§ 5.1), the observation Xobs(t) of the dynamic response will have a reduced dimension, such that:
For each state the corresponding observed mode shapes
The structure was modelled using Autodesk Robot software. All paired angle sections forming the diagonal bracing in the vertical panels were modelled using a single equivalent section. The cross-sections of the upper and lower longitudinal girders as well as those of the transverse beams were accurately represented. An additional 24 nodes were added in order to obtain the numerical mode shapes at the same longitudinal positions as in the physical model (Figure 14 and Figure 15).
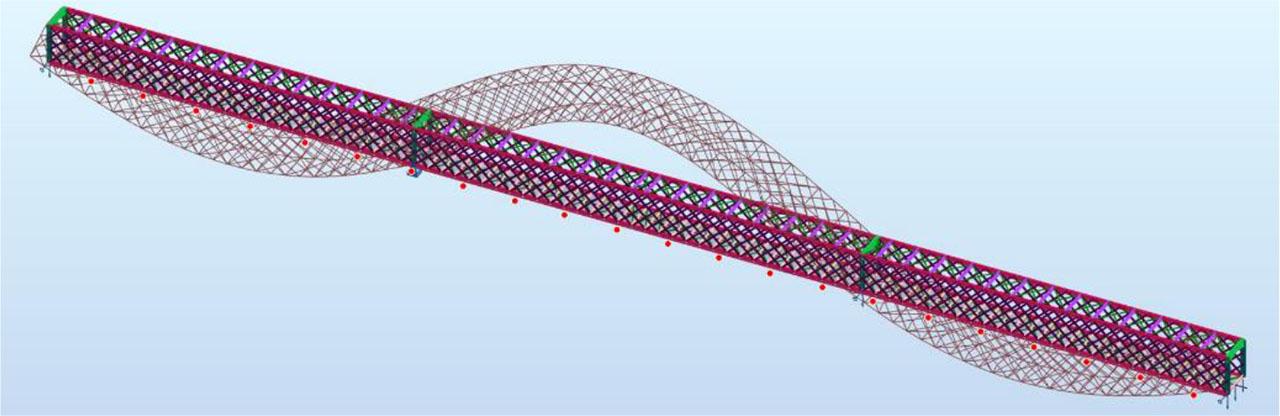
View of the first bending mode and sensor positions along the span
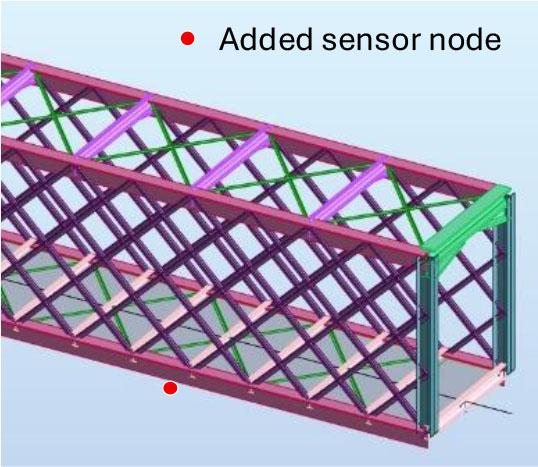
Zoom on the model
The lateral stiffness of the supports is neglected. The vertical stiffness considered corresponds to that of a masonry pier anchored in compact soil, with a value of Ks = 106kN/m (Turcotte et al., 2015). The Young’s modulus for all steel components is set to 210 GPa, and their mass density is 7850 kg/m3. The deck, supported by the transverse beams, is modelled with a surface mass density of 1305 kg/m2. The eigenvalue problem arising in the modal analysis is solved using the option Lanczos method. Only the first two vertical bending modes are considered throughout all simulations as well as during the Operational Modal Analysis (OMA). The computed numerical observed mode shapes are denoted
The acceleration signals from the sensors are filtered using a Singular Spectral Analysis procedure (Golyandina, 2020), leading to the reduction of measurement noise. The modal characteristics are determined using an output-only modal identification algorithm, based on the combination of Random Decrement (RD) technique together with an improved Ibrahim Time Domain (ITD) method (Ibrahim, 1977). The procedure also includes a clustering step and a statistical analysis of the obtained modal characteristics. Starting from the observations measured by the accelerometers at n locations on the bridge, the modal identification algorithm leads to the determination of the identified frequency, damping and reduced modes (§ 4.1)
In a first step, the model is calibrated by adjusting the stiffness of the finite elements and the supports. The mass matrix M is considered as a constant and the following parameterization of the stiffness matrix is adopted (Eq. 2):
A - either K or M,
It should be noted that the simplified model, having only one longitudinal dimension, does not take into account directly the axial forces in the members, and therefore their impact on the bending modes. Nevertheless, the following points justify the relevance of a simplified model: on the one hand, the limited number of modes used in the updating procedure; on the other hand, the unknown nature of the excitation, i.e. it cannot be guaranteed to be stationary, random, and centred. In such a context, the limited amount of modal information and the uncertainty inherent to its quality lead to minimizing, as much as possible, both the number of parameters to be updated and the complexity of the model. Moreover, this scenario is fully representative of common cases encountered during data acquisition campaigns on real structures.
The comparative analysis of the frequencies (Table 1) shows that the differences between the two uncalibrated numerical models are small with respect to the first natural frequency, considering the possible lack of representativeness of the simplified model. However, the differences are significant for the second natural frequency: the detailed model is therefore more accurate than the simplified one, even after updating. Nevertheless, given the experimental context described above and the convergence of the frequencies for state S2 across all modes, the use of the simplified model remains relevant.
First two natural frequencies with detailed FEM (Robot), Octave FEM and OMA values, for states S0 , S1 and S2
| State Sk | Natural frequency 1 [Hz] | Natural frequency 2 [Hz] | ||||
|---|---|---|---|---|---|---|
|
|
|
|
|
|
| |
| S0 | 2.50 | 2.49 | - | 3.51 | 3.74 | - |
| S1 | - | 2.44 | 2.45 | - | 3.69 | 3.46 |
| S2 | - | 2.46 | 2.49 | - | 3.72 | 3.71 |
For the first bending mode, Figure 16 and Figure 17 showing the modal shapes related to the uncalibrated initial state reveal a nearly similar discrepancy between the results from the OMA and those from each numerical model. However, for the second bending mode, the modes obtained from the simplified model show a larger discrepancy. The MAC (Modal Assurance Criterion) coefficient between two modes ϕ1 and ϕ2 is defined by the relation

a) First bending modes, b) second bending modes from Octave
a) First bending modes, b) second bending modes from Octave
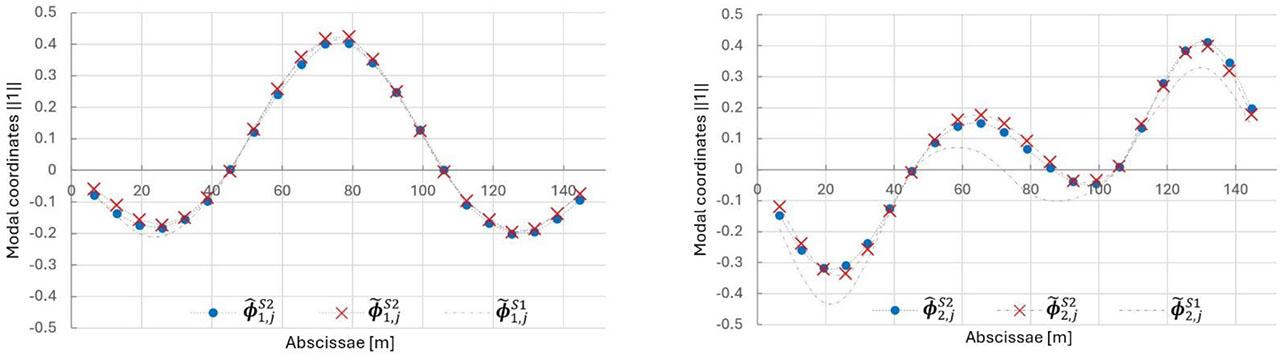
The modal shapes after updating the mass matrix from state S1 to state S2 show a strong similarity for both modes between the modal shapes obtained from the OMA and those from the updated simplified numerical model, such that
The updating of the simplified model from the uncalibrated initial state S0 to the calibrated state S1 by modifying the stiffness matrix (Equation 2) highlights a significant variation in the parameters associated with the sliding supports located at abscissa 47.25 m (Figure 18). This variation reflects an effective loss of stiffness in the structure at the location of pier P1, due to a discontinuity in the flange of the upper longitudinal girders. Additionally, an asymmetry is observed with respect to the pinned supports located at P2, caused by a reduced thickness of the flange of the lower longitudinal girders in that area. It should be emphasized that this structural detail was also identified thanks to the updating process. This behaviour, not explicitly accounted for in the simplified modelling, is partially compensated during the model calibration step.

Parameters variation during the model updating from KS0 to KS1
The updating of the simplified model from the uncalibrated state S1 to the calibrated state S2 by updating the mass matrix (Equation 1) highlights a very strong variation in the parameters associated with the deck area showing a mass loss located on the structure between 0 and 27 m (Figure 19).
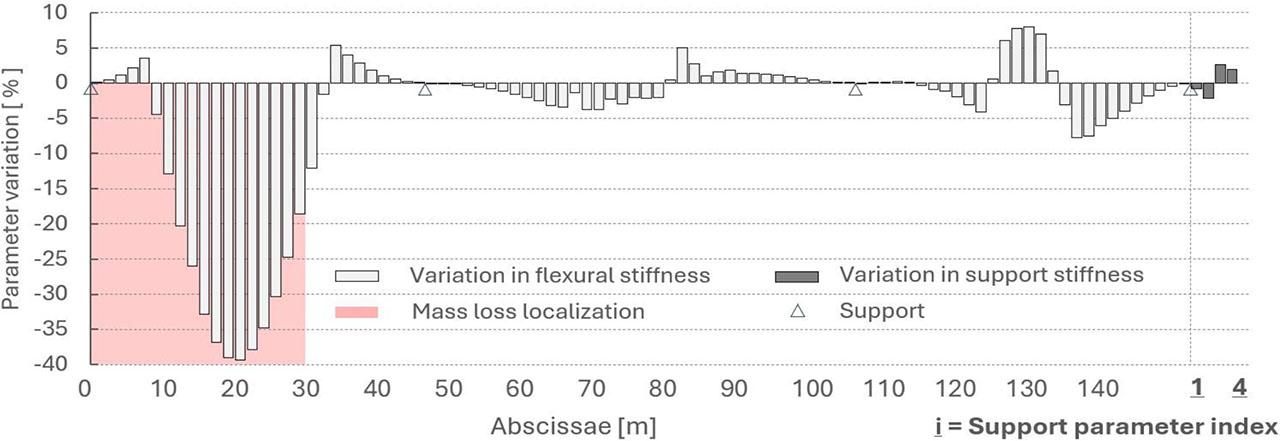
Parameters variation during the model updating from MS1 to MS2
The introduction of an intermediate step for calibrating the stiffness matrix in the updating process of a simplified numerical model made it possible to precisely identify the area of the structure affected by a loss of deck mass. Despite lower-quality excitation during the measurements and a limited number of modes used, the adjusted model proved sufficiently representative to detect and localize the structural modifications. Moreover, the order of magnitude of the maximum variations is close to reality (mass loss of about 50%). Given the assumptions of linearity and small perturbations underlying the updating methods, such a large modification could have compromised convergence and led to non-physically interpretable results (Friswell et al., 1995). The simplification of the model and the use of a suitable optimization method made it possible to avoid this pitfall.
The work presented illustrates the practical application of a vibration-based monitoring method for the assessment of a real structure undergoing partial demolition. The acquisition chain developed by the company Cideco in collaboration with the Institut Pascal enabled the collection of data corresponding to two distinct states of the Dallet bridge: before demolition (state S1) and during the demolition works (state S2). Based on these data, a simplified numerical model was updated in two successive steps: first by calibrating the stiffness matrix (from S0 to S1), then by updating the mass matrix (from S1 to S2). The model calibration step revealed, a posteriori, the presence of a structural singularity at support P1, consisting of a variation in the thickness of the flange on the lower longitudinal girders. Despite the unfavourable excitation conditions and the use of a limited number of modes, the updating step from the calibrated to the degraded state made it possible to localize the area affected by the mass loss and to provide an order of magnitude consistent with the actual level of structural modification. The model updating indicated a mass loss of up to about 40%. This quantification underestimates the true mass loss (whose order of magnitude is closer to 60%), which is to be expected considering the extent of the variation between states and the use of a perturbation-based approach for the updating. The comparison with a detailed FEM helped to demonstrate the relevance of this simplified approach for operational analysis. The study highlights the feasibility and effectiveness of simplified numerical model updating methods applied to existing structures, even in constrained environments.