
Figure 1.
Figure 2.
Figure 3.
Figure 4.
Figure 5.
Figure 6.
Figure 7.
Figure 8.

Figure 9.
Figure 10.
Figure 11.
Figure 12.
Figure 13.

Figure 14.
Figure 15.
Figure 16.
Figure 17.
Figure 18.

Figure 19.
Figure 20.

Figure 21.
Figure 22.
Figure 23.
Figure 24.
Figure 25.
Figure 26.
Figure 27.
Figure 28.
Figure 29.
Figure 30.
Figure 31.
Figure 32.

Figure 33.
Figure 34.
Figure 35.
Figure 36.
Figure 37.
Figure 38.
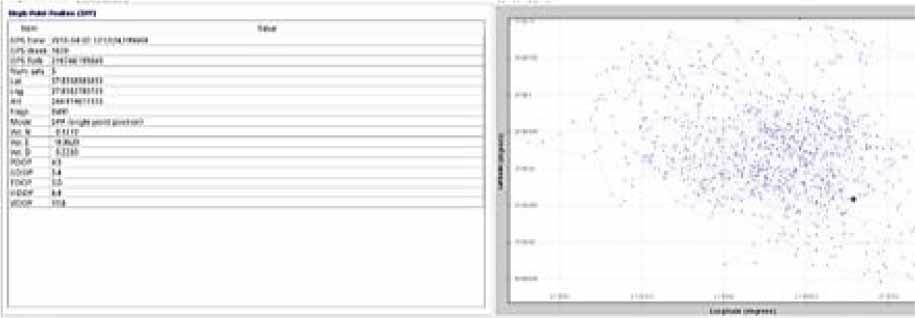
Figure 39.
Figure 40.
Figure 41.
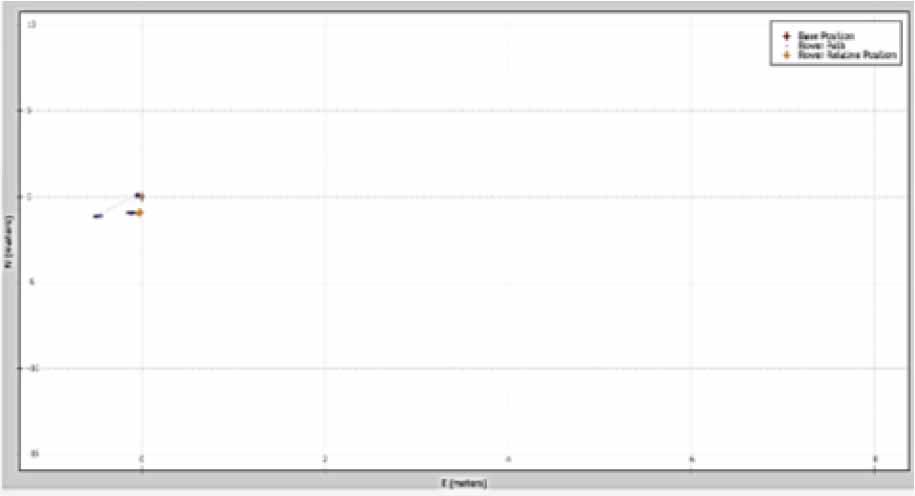
Figure 42.
Figure 43.
Figure 44.
Figure 45.
Figure 46.
Figure 47.
Figure 48.

Figure 49.

Comparison of Precision Farming and Conventional Farming Practices
| Feature | Precision Farming | Conventional Farming |
|---|---|---|
| Efficiency | Increased efficiency through tech | Lower efficiency |
| Resource Conservation | Minimizes resource overuse | Resource-intensive |
| Data-Driven Decision-Making | Informed decisions through data analysis | Experience-based decisions |
| Labor Requirements | Reduced labor needs (automation) | Labor-intensive |
| Environmental Impact | Reduced environmental impact | Environmental concerns |
| Initial Costs | Higher initial costs | Lower initial costs |
| Complexity | Complex data management | Simplicity and familiarity |
| Sustainability | Enhanced sustainability | Reduced sustainability |
Comparison of UAVs and UGVs in Agricultural Farm Operations
| Depth (cm) | Saturation (%) | Texture | Total Salinity (%) | PH | CaCO3(%) | Total N (%) |
|---|---|---|---|---|---|---|
| 0–30 | 30.00 | Sandy | 0.0113 | 7.80 | 5.60 | 0.11 |
| 30–60 | 31.00 | Loamy | 0.0159 | 7.87 | 4.80 | 0.11 |
| 60–90 | 37.00 | Loamy | 0.0282 | 7.88 | 8.00 | 0.09 |
| Condition | Non-Saline | Slightly Alkaline | High | Medium | ||
Location Data Comparison Table
| Single Point Position (SPP) location data obtained with Piksi RTK GPS | Location data obtained using Google Maps | |
|---|---|---|
| Latitude (Decimal) | 37.8568583853 | 37.856858 |
| Longitude (Decimal) | 27.8582785723 | 27.858279 |
| Latitude (Degrees Minutes Seconds) | 37° 51’24.6902” N | 37° 51’ 24.7” N |
| Longitude (Degrees Minutes Seconds) | 27° 51’29.8029” E | 27° 51’ 29.8” E |
| Distance between the two acquired points (Decimal) | 0,00000039 | -0,00000043 |
| Distance between the two acquired points (Degrees Minutes Seconds) | 0° 0’0.0014” N | 0° 0’ 0.0015” W |
| Distance between the two acquired points (Meters) | 0.06455 m | |
Open Data Resources in the Field of Smart Agriculture [6]
| Data Source | Description |
|---|---|
| USDA National Agricultural Statistics Service (NASS) Data | Crop production, livestock statistics, and agricultural information in the United States |
| European Space Agency’s Sentinel Data | High-resolution satellite imagery for crop monitoring and land use |
| NOAA Climate Data | Weather and climate data, including forecasts, rainfall, and temperature |
| Global Open Data for Agriculture and Nutrition (GODAN) | Open datasets related to agriculture, food security, and nutrition |
| NASA Earthdata | Remote sensing data for monitoring climate, soil moisture, and vegetation |
| FAO Data | Agricultural data and information on global food production and trade |
| IoT Sensor Data | Sensor data, such as soil moisture and temperature, from IoT devices in fields |
| Crop and Soil Databases | Information on crop yields, soil quality, and nutrient levels |
| Agricultural Research Institutions | Data from research institutions on crop trials, pest monitoring, and experiments |
| OpenWeatherMap | Weather data, including current conditions, forecasts, and historical records |
| Government Agricultural Portals | Information on farming practices, subsidies, and agricultural policies |
| Community-Generated Data | User-generated data sharing experiences, practices, and insights |