
Figure 1.
Figure 2.
Figure 3.
Figure 4.
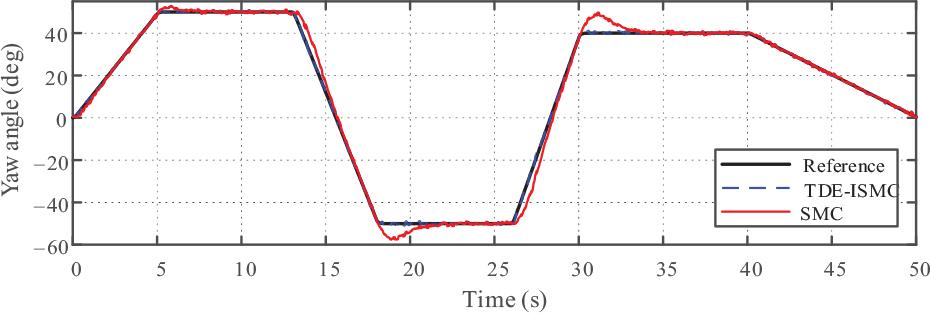
Figure 5.
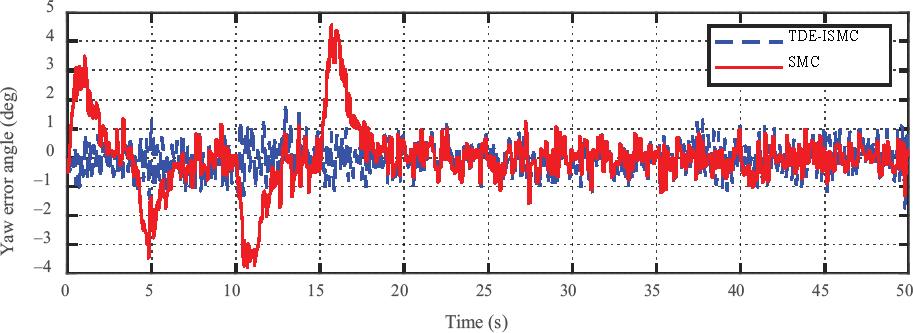
Figure 6.
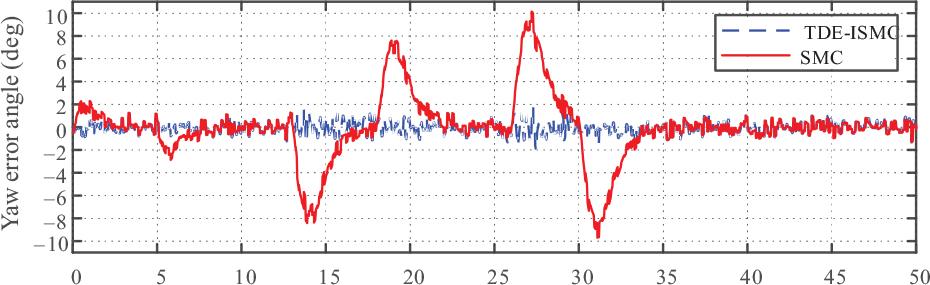
Figure 7.
Figure 8.
Figure 9.
Figure 10.
Figure 11.
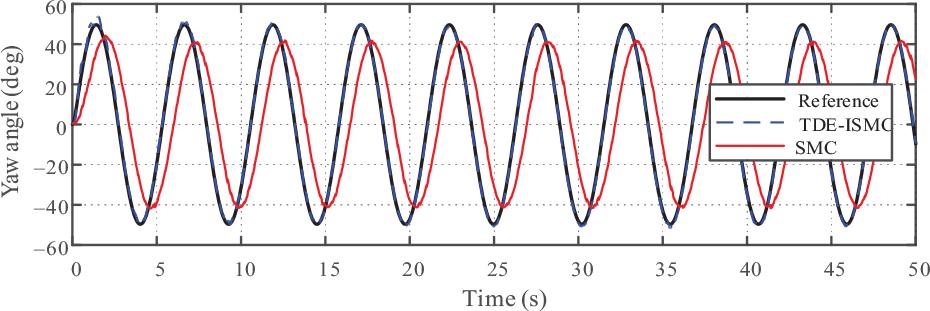
Figure 12.
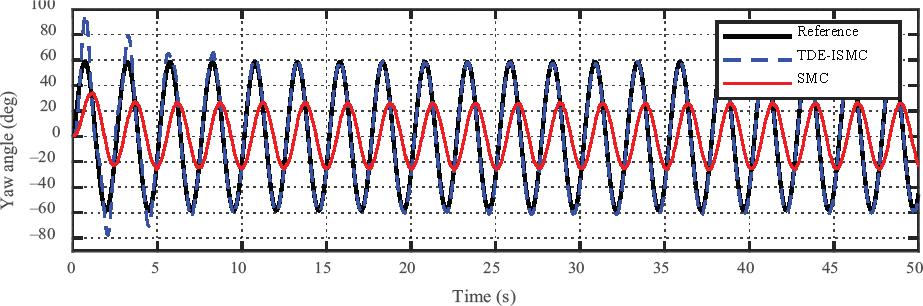
Figure 13.
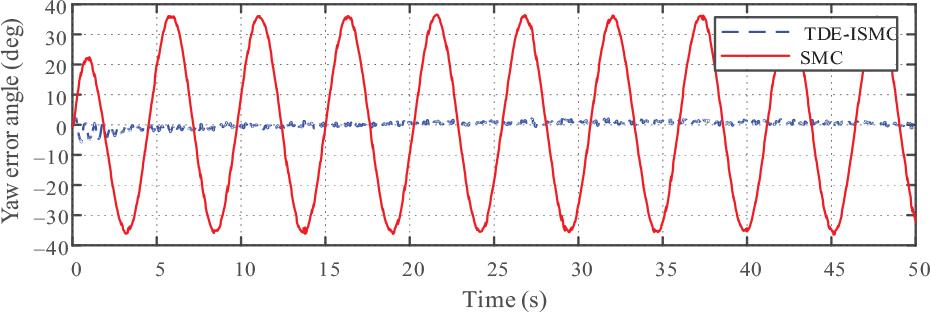
Figure 14.
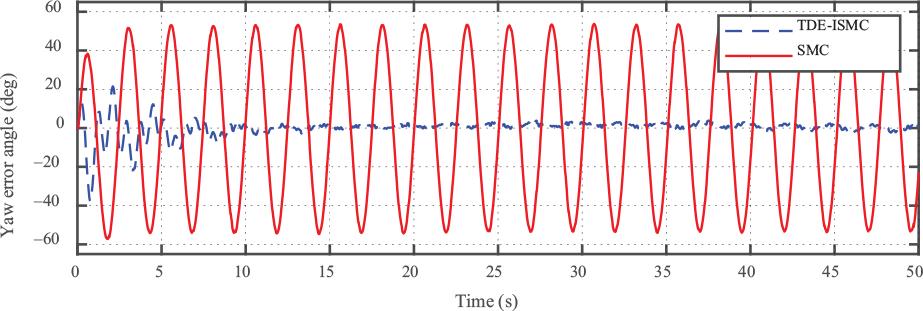
Figure 15.
Figure 16.
Figure 17.
Figure 18.
RMSE and ITAE in scenario #2 (sine waves)_
| Reference | RMSE | ITAE | ||
|---|---|---|---|---|
| Type (c) | Type (d) | Type (c) | Type (d) | |
| TDE-ISMC | 1.0319 | 4.2562 | 0.0465 | 0.1311 |
| SMC | 24.6861 | 37.5185 | 1.3234 | 2.0241 |
RMSE and ITAE in scenario #1 (trapezium waves)_
| Reference | RMSE | ITAE | ||
|---|---|---|---|---|
| Type (a) | Type (b) | Type (a) | Type (b) | |
| TDE-ISMC | 0.5223 | 0.5226 | 0.0254 | 0.0252 |
| SMC | 0.9967 | 2.5176 | 0.0384 | 0.0825 |